
A proposed lightweight, micromachined winch would have microscopic structural details and mesoscopic overall dimensions and would be capable of generating bidirectional macro- scopic motion (maximum cable extension or retraction ≈1 m) with submicron increments. Winches like this one could be useful for actuating small mechanisms in scientific instruments and robots: examples of such mechanisms include translation stages; slide shutters and filters for imaging photodetector arrays; pan, tilt, or zoom actuators for cameras; mechanisms for dragging sampling scoops; and steering mechanisms for small robotic vehicles.
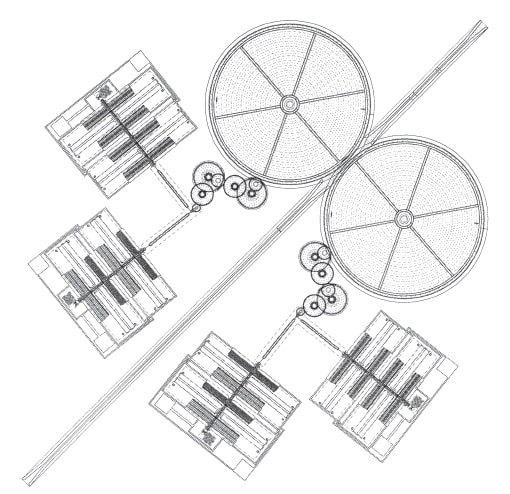
The proposed winch (see figure) would be fabricated in a four-layer polycrystalline-silicon surface-micromachining process. Electrostatic comb actuators would be the prime movers, generating motion in increments that gear trains would reduce to submicron values. The final gears in the gear trains would pinch and retract (or extend) a miniature cable, thereby generating the submicron increments of translation.
In one example design, the electrostatic comb drives would operate in four-phase cycles. For each such cycle, a 19-tooth pinion gear would undergo one revolution. The pinion gear would be meshed with a 12.57-μm-pitch winch gear, so that one revolution of a pinion would result in a 238.83-μm translation. The thrust of each comb drive would be ≈1 μN and could be applied rapidly enough to sustain rotational speeds up about 4,000 revolutions per second. Two tandem gear trains would reduce the translation to 1.66 μm per pinion rotation or, equivalently, 0.415 μm per phase step of an electrostatic comb drive, and would increase the torque proportionally. Given the foregoing parameters, the maximum speed of retraction or extension of the cable would be ≈6 mm/s.
Assuming design rules and fabrication based on a fundamental designrule length of 1 μm, the gear backlash per mesh would be ≈1 μm. For the purpose of precise positioning, it would be necessary to measure the aggregate backlash prior to operation and thereafter, during operation, correct for the aggregate backlash at each cable-draw reversal.
This work was done by Frank T. Hartley of Caltech for NASA’s Jet Propulsion Laboratory.
This Brief includes a Technical Support Package (TSP).

Mesoscopic Winch for Precise Extension and Retraction
(reference NPO-20979) is currently available for download from the TSP library.
Don't have an account? Sign up here.
More From SAE Media Group


Tech Briefs
Lunar Surface Manipulation System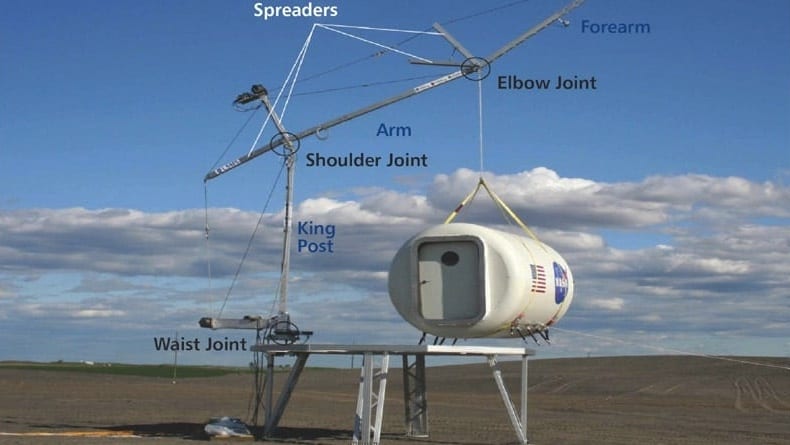
Tech Briefs
Gear Bearings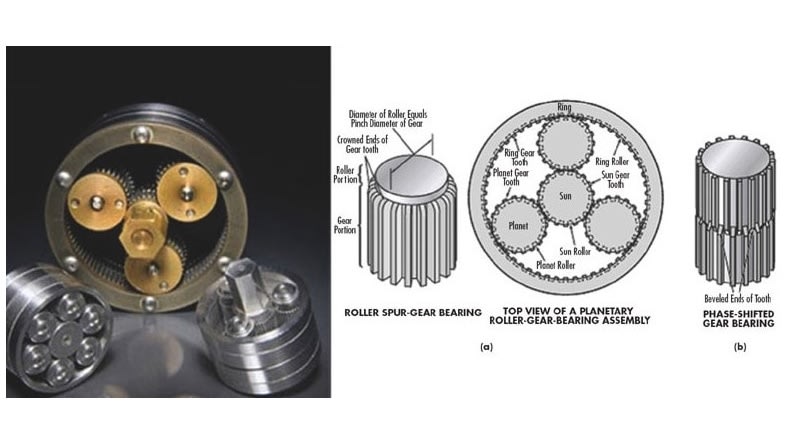

Medical Design Briefs
Mechatronic Integration for Precision Medical Device Linear Motion

Tech Briefs
Linear Back-Drive Differentials
Tech Briefs
Mesoscopic Steerable Mirror



Medical Design Briefs
Quiet Gears Improve Patient Comfort and Imaging Quality in Medical Equipment

Tech Briefs
Coiled Linear Actuators for Soft Robotics


Tech Briefs
Shape Memory Alloy (SMA)-Enabled ActuatorsMobility Engineering
Investigation of Flight Dynamics and Controls for a Solar-Tracker-Mounted UAV
Tech Briefs
Rotary-Hammer Core Sample Acquisition Tool

Motion Control Tech Briefs Magazine
This article first appeared in the October, 2002 issue of Motion Control Tech Briefs Magazine.
Read more articles from the archives here.