Browse innovative developments in motion control technologies. Find essential news, technical briefs and applications used in PID controllers, servo motors, direct drive solutions, autonomous positioning, and motion-related components.
Relying solely on motor-based force/speed curves often leads to undersized actuators and costly system delays. This white paper explores the critical gap between...
An essential question engineers ask before specifying a rotary ball spline is: Should the rotary spline nut be riding on angular contact ball bearings or crossed roller bearings?
From packaging to life science applications to office equipment to factory automation, smooth motion, fast accelerating and highly accurate are hallmarks of high quality linear movement actuators. Together with...
This white paper describes new technology that enable engineers to easily program key functions into a linear position sensor and the inductive sensing technology that makes it...
The medical industry is constantly growing, which has led to stricter requirements for medical equipment. Installation space is one particular area where designers and...
While growing up, many of us were fascinated by watching gears turning, whether in bicycles, clocks or garbage trucks packing trash on the old rear-load machines. Today, gearing systems play a crucial role in machinery, transmitting power efficiently and reliably across a wide range of applications. Read on to learn more.
The future of industrial autonomy will not be defined by systems that operate as opaque black boxes, but by approaches that deliberately embed the expertise of the people who know the processes best. Machine teaching makes this possible by making the skills and strategies of expert operators the foundation of AI system design. Read on to learn more.
See the new products, including NVIDIA's IGX Thor, an industrial-grade platform built to bring real-time physical AI directly to the edge; Teknic's precision planetary gearboxes; PI's L-220 series linear actuators; Compact Click dev tool from MIKROE; and more.
Spider silk spins new life into nerve repair…3D‐printed implants help repair spinal cord injuries…plasma pen transforms adhesion in medical device manufacturing. Read about these and...
A new prototype of a knitting machine creates solid, knitted shapes, adding stitches in any direction — forward, backward, and diagonal — so users can construct a wide variety of shapes and add...
The USC Department of Astronautical Engineering (ASTE) is expanding its focus on space robotics, with an emphasis on autonomous systems that can operate in extreme and unmapped environments....
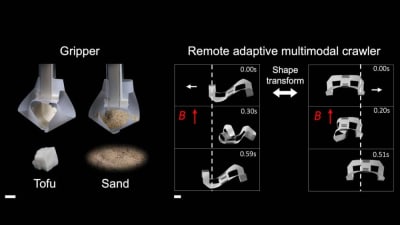
Researchers have created a class of robots made from thin sheets of material that can snap into hundreds of stable shapes — allowing them to execute a wide variety of...
Researchers from UMass Amherst are working to define the primary mathematical components of running. Compared to walking, much less is understood about...
Matching three-phase AC motors with variable frequency drives introduces specific thermal, electrical and control considerations that call for close attention during...
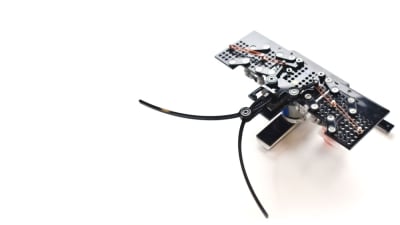
Imagine a tiny robot, no bigger than a leaf, gliding across a pond’s surface like a water strider. One day, devices like this could track pollutants, collect water samples or scout...
This white paper explores design considerations for modern packaging lines, focusing on achieving reliable and cost-effective performance. It identifies key industry pressures like the need for...
Tsubaki KabelSchlepp’s ROBOTRAX® System is engineered for precision, durability, and versatility in robotic cable management. Designed for three-dimensional swivel and rotation movements, the ROBOTRAX® System ensures a long...
Lasers vs. drones: military demonstrates new tech…high-‐flying uncrewed solar aircraft aces key test…the next frontier for autonomous UAVs. Read about these and other developments in this...
These servo reducers deliver exceptional performance for even the most demanding applications. They are expertly designed to meet the needs of industries such as...
Benchmarking the impact of climatic conditions on EV charging times…how battery simulation is speeding EV development…a new standard for battery leak testing. Read about these and other...
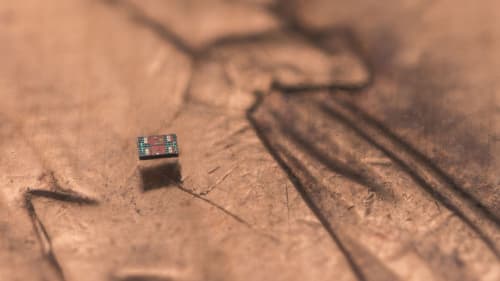
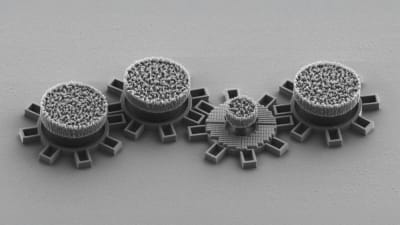
For more than 30 years, researchers have been trying to create small gears in order to construct micro-engines. But progress stalled at 0.1 millimeters, as it was not possible to build the...
Introducing X1: The world's first multirobot system that integrates a humanoid robot with a transforming drone that can launch off the humanoid's back and, later, drive away. The versatile team can...
From sorting objects in a warehouse to navigating furniture while vacuuming, robots today use sensors, software control systems, and moving parts to perform tasks. The harder the task or more complex the...
The path to recovery for stroke survivors taking their first tentative steps, or individuals navigating daily challenges from balance disorders, often feels...
As electronics manufacturing evolves, so do the demands for smarter, more efficient motor solutions. This whitepaper from Dunkermotoren dives into the megatrends of energy...
Today's industrial machines demand faster, more efficient designs. Engineers must choose between traditional external motor actuators and integrated servo motor units....
Automation is a powerful tool, but only when designed and implemented with a systems-level mindset. Failures rarely stem from the automation hardware itself but often result from gaps in planning, integration, or life cycle support. Read on to learn more.
See the new products, including Kassow Robots' Sensitive Arm technology across its complete range of 7-axis collaborative robots; igus' first humanoid robot, Iggy Rob, designed to support industrial production, service environments, and transport tasks; Weidmuller USA's unmanaged Single Pair Ethernet Switch that enables a seamless networking experience for users in a wide array of industrial environments; BizLink's careDP, an AI-powered condition monitoring system designed to revolutionize maintenance in robotic production lines; and more.