
Currently cruising through space at more than 10,000 mph, the Mars Science Laboratory (MSL) is scheduled to touch down on the red planet in August. The Mars Science Laboratory was launched on November 26, 2011, and is part of NASA’s long-term effort of robotic exploration of Mars.
To accomplish its mission of determining whether the landing area has ever had, or still offers, environmental conditions favorable to microbial life, the MSL’s Curiosity rover is tasked with navigating and mapping the rocky Gale crater while avoiding the numerous hazards it will face as it moves across the Martian terrain. Custom-designed CCD (charge coupled device) image sensors from Teledyne DALSA that proved their reliability in the previous Mars Exploration Rover (MER) mission will function as the navigational eyes for the rover.
The Curiosity rover is designed to roll over obstacles up to 65 centimeters (25 inches) high and travel up to 200 meters (660 feet) per day as it explores Mars. To ensure that the rover can see its way successfully across the Martian landscape, NASA’s Jet Propulsion Laboratory (JPL) engineers outfitted it with sensors that provided successful guidance capabilities on the last MER mission.
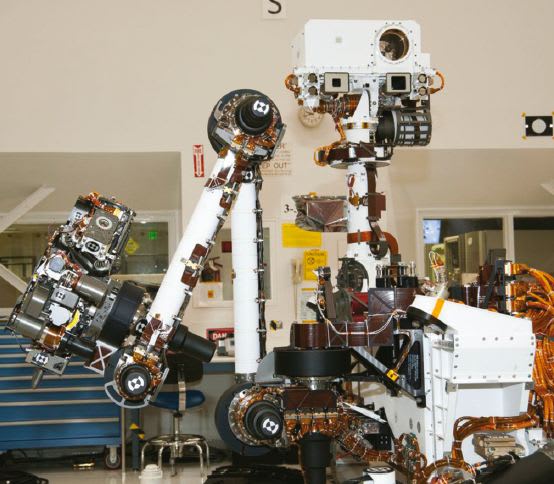
These MER CCD sensors are mounted on two different types of engineering cameras: the hazard avoidance cameras, known as “Hazcams,” and navigation cameras called “Navcams.” Hazcams and Navcams will work together to provide a complementary and comprehensive view of the terrain. Eight black-and- white Hazcams are mounted on the lower portion of the front and back of the rover. Each camera has a wide (124 x 124 degree) field of view. The cameras must have a wide viewing range on either side because, unlike human eyes, the Hazcams cannot move independently since they are mounted directly to the rover body. The rover will use pairs of images generated by these cameras to map out the shape of the terrain as far as 3 meters (10 feet) in front of it in a wedge shape that is over 4 meters wide (13 feet) at the farthest distance.
The Hazcams will use visible light to capture three-dimensional (3D) imagery. This imagery will safeguard against the rover getting lost or inadvertently colliding with objects, and it will work in tandem with software that allows the rover to make its own safety choices and to think on its own. The Hazcams also are used by ground operators to drive the vehicle and to operate the robotic arm.
The navigation camera (45 x 45 degree field of view) unit consists of a stereo pair of black-and-white navigation cameras mounted on the mast (Curiosity’s neck and head) that will use visible light to gather panoramic 3D imagery of the ground near the wheels. Scientists and engineers will make surface navigation plans based on what the images tell them about nearby rocks or other obstacles. The Navcams also are used for onboard obstacle detection.
Between 1998 and 2003, DALSA and NASA engineers worked together to design and build several versions of the CCD sensor for the MER project. NASA engineers designed the 1.2 x 2.4 cm 1k frame transfer CCD sensors, which convert light into electrical signals, while DALSA provided fabrication expertise.
DALSA engineers reviewed the design with NASA engineers, proposed changes, made masks to build the devices, and fabricated and tested the wafers. Then the wafers were sent to NASA, where the CCD was tested and assembled. Full, extended qualification of the devices found no flaws, so the devices were selected to fly to Mars.
NASA incorporated ten of these sensors on each of the two Mars Exploration Rovers, Spirit and Opportunity, which launched in 2003. NASA used this technology again in the Curiosity’s navigation and hazard-avoidance cameras. The CCDs used on the current project were selected from the batch of sensors that performed well on the Spirit rover and that continue to guide the Opportunity rover’s journey across the Martian surface.
CCD image sensors
Teledyne DALSA
Waterloo, ON, Canada
514-333-1301
www.teledynedalsa.com
For Free Info Click Here