
A software package reads and analyzes pressure distributions from sensors mounted under a person’s feet. Pressure data from sensors mounted in shoes, or in a platform, can be used to provide a description of postural stability (assessing competence to deficiency) and enables the determination of the person’s present activity (running, walking, squatting, falling). This package has three parts: a preprocessing algorithm for reading input from pressure sensors; a Hidden Markov Model (HMM), which is used to determine the person’s present activity and level of sensing-motor competence; and a suite of graphical algorithms, which allows visual representation of the person’s activity and vestibular function over time.
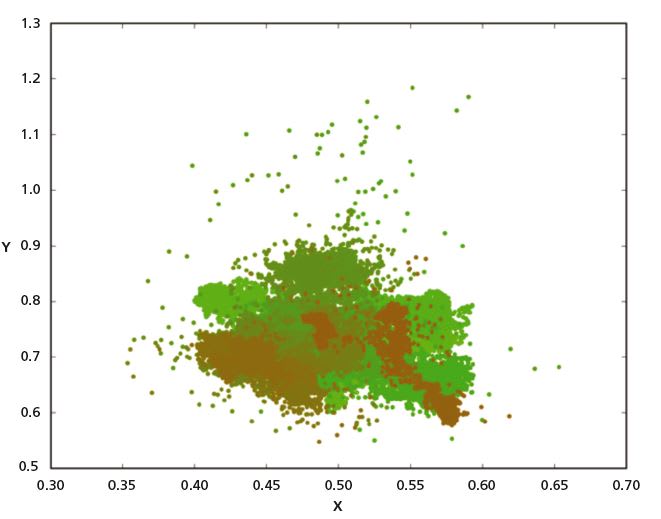
In this innovation, the Hidden Markov Model algorithm assesses center- of-force time series data. Using the Viterbi algorithm acting on center-offorce velocity, these trajectories can be classified into local equilibria separated by dynamic regions. These dynamic regions represent control failures and, ordinarily, lead into a new equilibrium. However, the local equilibria wander inside a broad “safe zone” of which the size and shape are able to be quantified (see figure). By quantifying the dwell time, size, and shape of the equilibria, the dynamic trajectories and the safe zone as a whole, sensing-motor performance can be assessed. For instance, equilibria for subjects with their eyes closed are shorter and more diffuse than those for subjects with eyes open.
This same algorithm can easily distinguish quiescent standing from squatting or a hand raise and may be useful in checking how well an astronaut is adjusting to changes in gravitational field strength, in the context of Earth re-entry following space travel, or a Moon or Mars mission. Also, this innovation can be used to help a physical therapist gauge the progress of a stroke patient relearning skills like standing, walking, and running. The algorithm can be used as a training tool for athletes by quantifying their daily behavior (time spent running, etc) during training.
This work was a joint effort done by Erez Lieberman, MIT and Harvard; Katharine Forth, USRA; and William Paloski, NASA Johnson Space Center. Inquiries concerning rights for its commercial use should be addressed to:
Massachusetts Institute of Technology
Director of Technology Licensing Office Room NE 25-230
Five Cambridge Center, Kendall Square
Cambridge, MA 02142
MSC-24387-1