
Shape memory alloy (SMA) actuators provide the highest force-to-weight ratio of any known actuator. They can be designed for a wide variety of form factors from flat, thin packages, to formmatching packages for existing actuators. SMA actuators can be operated many thousands of times, so that ground testing is possible. Actuation speed can be accurately controlled from milliseconds to position and hold, and even electronic velocity-profile control is possible. SMA actuators provide a high degree of operational flexibility, and are truly smart actuators capable of being accurately controlled by onboard microprocessors across a wide range of voltages.
The SPA1 actuator utilizes commercially available SMA actuator wire to provide 3/8-in. (≈1 cm) of stroke at a force of over 28 lb (≈125 N). The force is provided by a unique packaging of the single SMA wire that provides the output force of four SMA wires mechanically in parallel. The output load is shared by allowing the SMA wire to “slip” around the output attachment end to adjust or balance the load, preventing any individual wire segment from experiencing high loads during actuation. A built-in end limit switch prevents overheating of the SMA element following actuation when used in conjunction with the Miga Analog Driver [a simple MOSFET (metal–oxide–semiconductor fieldeffect transistor) switching circuit].
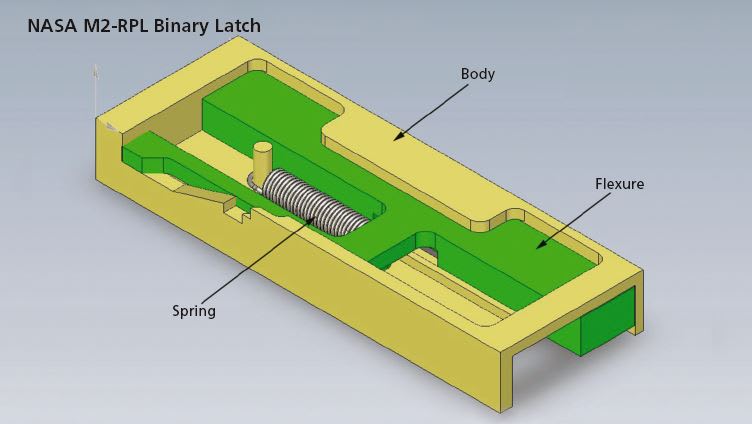
A simple 2D machined mechanical binary latch has been developed to complement the capabilities of SMA wire actuators. SMA actuators typically perform ideally as “latch-release” devices, wherein a spring-loaded device is released when the SMA actuator actuates in one direction. But many applications require cycling between two latched states — open and closed.
This work was done by Mark A. Gummin of Miga Motor Company for NASA Glenn Research Center.
Inquiries concerning rights for the commercial use of this invention should be addressed to NASA Glenn Research Center, Innovative Partnerships Office, Attn: Steven Fedor, Mail Stop 4–8, 21000 Brookpark Road, Cleveland, Ohio 44135. LEW-18582-1