
Long tool bits are undergoing development that can be stowed compactly until used as rock- or ground-penetrating probes actuated by ultrasonic/sonic mechanisms. These bits are designed to be folded or rolled into compact form for transport to exploration sites, where they are to be connected to their ultrasonic/sonic actuation mechanisms and unfolded or unrolled to their full lengths for penetrating ground or rock to relatively large depths. These bits can be designed to acquire rock or soil samples and/or to be equipped with sensors for measuring properties of rock or soil in situ. These bits can also be designed to be withdrawn from the ground, restowed, and transported for reuse at different exploration sites.
Examples of properties that could be measured by use of an instrumented tool bit include electrical conductivity, permittivity, magnetic field, magnetic permeability, temperature, and any other properties that can be measured by fiber-optic sensors. The problem of instrumenting a probe of this type is simplified, relative to the problem of attaching electrodes in a rotating drill bit, in two ways:
(1) Unlike a rotating drill bit, a bit of this type does not have flutes, which would compound the problem of ensuring contact between sensors and the side wall of a hole; and (2) there is no need for slip rings for electrical contact between sensor electronic circuitry and external circuitry because, unlike a rotating drill, a tool bit of this type is not rotated continuously during operation.
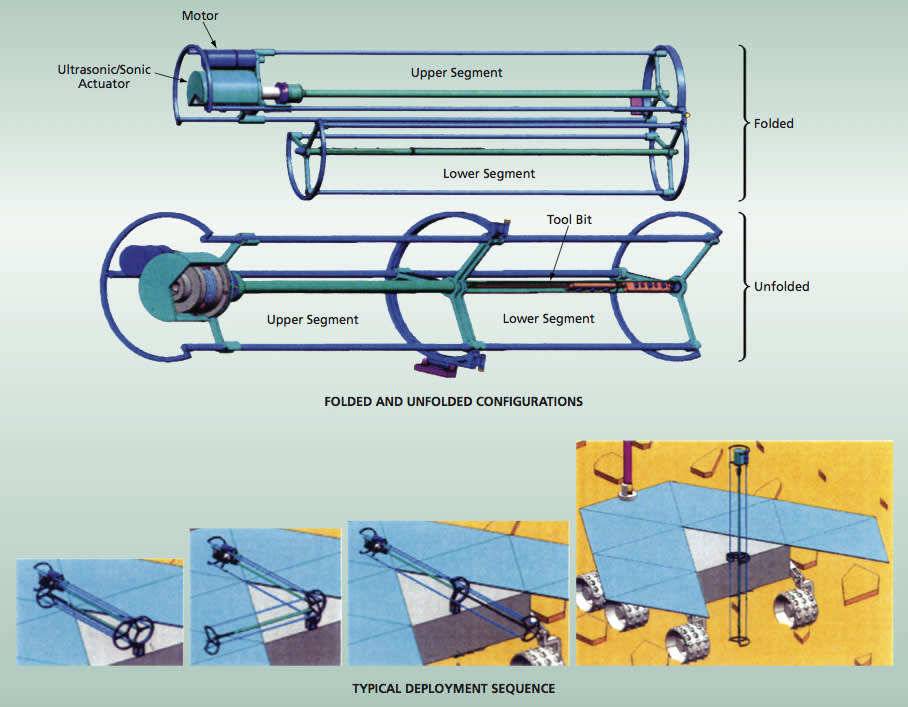
One design for a tool bit of the present type is a segmented bit with a segmented, hinged support structure (see figure). The bit and its ultrasonic/sonic actuator are supported by a slider/guiding fixture, and its displacement and preload are controlled by a motor. For deployment from the folded configuration, a spring-loaded mechanism rotates the lower segment about the hinges, causing the lower segment to become axially aligned with the upper segment. A latching mechanism then locks the segments of the bit and the corresponding segments of the slider/guiding fixture. Then the entire resulting assembly is maneuvered into position for drilling into the ground.
Another design provides for a bit comprising multiple tubular segments with an inner alignment string, similar to a foldable tent pole comprising multiple tubular segments with an inner elastic cable connecting the two ends. At the beginning of deployment, all segments except the first (lowermost) one remain folded, and the ultrasonic/sonic actuator is clamped to the top of the lowermost segment and used to drive this segment into the ground. When the first segment has penetrated to a specified depth, the second segment is connected to the upper end of the first segment to form a longer rigid tubular bit and the actuator is moved to the upper end of the second segment. The process as described thus far is repeated, adding segments until the desired depth of penetration has been attained.
Yet other designs provide for bits in the form of bistable circular- or rectangular-cross-section tubes that can be stowed compactly like rolls of flat tape and become rigidified upon extension to full length, in a manner partly similar to that of a common steel tape measure. Albeit not marketed for use in tool bits, a bistable reeled composite product that transforms itself from a flat coil to a rigid tube of circular cross section when unrolled, is commercially available under the trade name RolaTube™ and serves as a model for the further development of tool bits of this subtype.
This work was done by Yoseph Bar-Cohen, Mircea Badescu, Theodore Iskenderian, Stewart Sherrit, Xiaoqi Bao, and Randel Lindemann of Caltech for NASA’s Jet Propulsion Laboratory. For more information, download the Technical Support Package (free white paper) at www.techbriefs.com/tsp under the Mechanics/Machinery category. NPO-45289
This Brief includes a Technical Support Package (TSP).
Foldable Instrumented Bits for Ultrasonic/Sonic Penetrators
(reference NPO-45289) is currently available for download from the TSP library.
Don't have an account?
Overview
The document presents a Technical Support Package from NASA's Jet Propulsion Laboratory (JPL) detailing a novel subsurface penetrator designed for in-situ measurements on planetary bodies, particularly Mars. This penetrator features a foldable bit mechanism that allows it to be compactly stowed for launch and then unfolded for deep penetration into the subsurface. The primary goal of this technology is to facilitate the examination of various geological and environmental properties without the need to return samples to the surface, thereby reducing the risk of cross-contamination and loss of volatiles.
The penetrator is capable of measuring a range of properties, including dielectric constant, conductivity, magnetic field, magnetic permeability, and temperature, using onboard electronics. It can be deployed from various platforms such as landers, rovers, and fixed structures, making it versatile for different mission scenarios. The design includes multiple bit deployment modalities, such as a segmented bit that unfolds during penetration and a bi-stable structure that can be rolled into a tube shape.
The document emphasizes the importance of water in the context of Mars exploration, linking it to the overarching scientific goals of NASA's Mars Exploration Program (MEP), which focuses on life, climate, geology, and preparation for human exploration. The penetrator's ability to detect water and acquire samples directly addresses the need for effective in-situ probes that can operate at multiple locations within a field site.
The penetrator's design overcomes limitations associated with conventional rotary drills, which are restricted by the types of sensors they can accommodate and require high axial loads and torque. By utilizing an ultrasonic/sonic actuated mechanism, the penetrator can achieve significant penetration depth with reduced force and power requirements.
Overall, this document outlines a significant advancement in planetary exploration technology, showcasing a penetrator that not only enhances our ability to study subsurface conditions but also aligns with NASA's goals of understanding the Martian environment and its potential for supporting life. The innovative design and functionality of the penetrator represent a promising step forward in the quest for knowledge about Mars and other celestial bodies.