
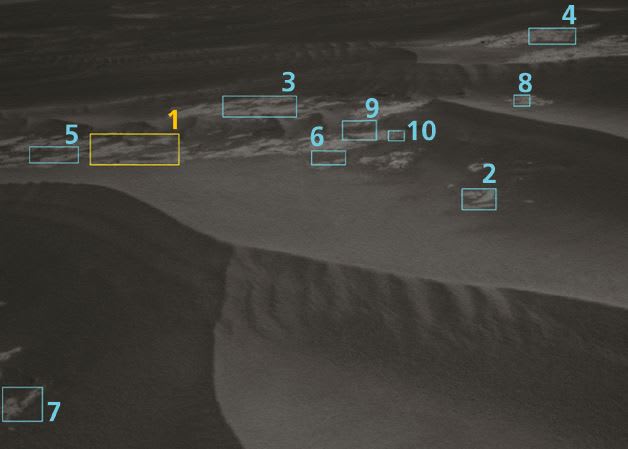
Rockster-MER is an autonomous perception capability that was uploaded to the Mars Exploration Rover Opportunity in December 2009. This software provides the vision front end for a larger software system known as AEGIS (Autonomous Exploration for Gather ing Increased Science), which was recently named 2011 NASA Software of the Year. As the first step in AEGIS, Rockster-MER analyzes an image captured by the rover, and detects and automatically identifies the boundary contours of rocks and regions of outcrop present in the scene. This initial segmentation step reduces the data volume from millions of pixels into hundreds (or fewer) of rock contours. Subsequent stages of AEGIS then prioritize the best rocks according to scientist- defined preferences and take high-resolution, follow-up observations (see figure). Rockster-MER has performed robustly from the outset on the Mars surface under challenging conditions.
Rockster-MER has now been run onboard Opportunity numerous times as part of AEGIS with exceptional performance. Sample results are available on the AEGIS website at http://aegis.jpl.nasa.gov .
This work was done by Michael C. Burl, David R. Thompson, Benjamin J. Bornstein, and Charles K. deGranville of Caltech for NASA’s Jet Propulsion Laboratory.
This software is available for commercial licensing. Please contact Dan Broderick at
This Brief includes a Technical Support Package (TSP).
Memory-Efficient Onboard Rock Segmentation
(reference NPO-47954) is currently available for download from the TSP library.
Don't have an account?
Overview
The document discusses the Rockster-MER software, an autonomous perception system developed for the Mars Exploration Rover (MER) Opportunity, which operates under the Jet Propulsion Laboratory (JPL) at the California Institute of Technology. Rockster-MER is designed to perform rock segmentation and detection from monocular imagery collected by the rover, a task critical for scientific exploration on Mars.
The software is part of the AEGIS (Autonomous Exploration for Gathering Increased Science) technology demonstration, which aims to enhance the rover's ability to autonomously identify and prioritize scientific targets. Rockster-MER has been optimized for the resource-constrained environment of Mars, where limitations in CPU power, memory, and energy are significant. It runs on the RAD6000 and RAD750 flight processors, with a peak memory footprint of less than four times the base image size, representing a substantial improvement over the original Rockster algorithm.
Performance metrics indicate that Rockster-MER can process a 1K x 1K image in approximately 10-15 minutes on the rover, while on modern workstations, the same processing takes only about 0.4 seconds. The software has successfully detected various geological features, including outcrops and loose rocks, which are essential for understanding the Martian landscape. However, there have been instances where the software reported detections of non-target objects, such as rover components or soil disturbances, which are still of scientific interest.
The document also acknowledges the contributions of the AEGIS team and highlights the ongoing interest from the European Space Agency (ESA) in developing similar technologies for future missions, such as ExoMars. The Rockster-MER software has been operational since December 2009 and has demonstrated its effectiveness in autonomous rock segmentation, making it a flight-proven solution for Mars exploration.
In conclusion, Rockster-MER represents a significant advancement in onboard image processing for planetary exploration, enabling the Opportunity rover to autonomously identify and prioritize scientific targets, thereby enhancing the efficiency and effectiveness of Mars missions. The ongoing development and refinement of such technologies are crucial for future explorations of Mars and beyond.