
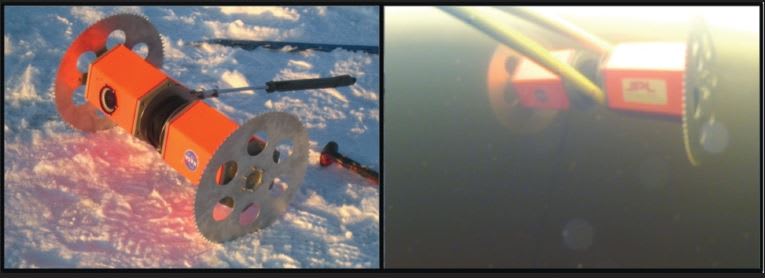
A buoyant rover has been developed to traverse the underside of ice-covered lakes and seas. The rover operates at the ice/water interface and permits direct observation and measurement of processes affecting freeze- over and thaw events in lake and marine environments. Operating along the 2- D ice-water interface simplifies many aspects of underwater exploration, especially when compared to submersibles, which have difficulty in station-keeping and precision mobility.

This work was done by John M. Leichty, Andrew T. Klesh, Daniel F. Berisford, Jaret B. Matthews, and Kevin P. Hand of Caltech for NASA’s Jet Propulsion Laboratory. NPO-48863
This Brief includes a Technical Support Package (TSP).
Positive-Buoyancy Rover for Under Ice Mobility
(reference NPO-48863) is currently available for download from the TSP library.
Don't have an account?
Overview
The document outlines the development of a Positive-Buoyancy Rover designed for under-ice exploration, spearheaded by the Jet Propulsion Laboratory (JPL) at the California Institute of Technology. The primary objective of this project is to demonstrate the feasibility of buoyant roving in ice-water systems, thereby enhancing JPL's capabilities for exploration in extreme environments.
The rover prototype is constructed using plastic 3D printing and commercial off-the-shelf (COTS) parts, which allows for rapid manufacturing and cost-effectiveness. It features a unique design that includes two wheels and a flexible tail, enabling it to fit through a 10-inch borehole in ice. The rover is equipped with multiple cameras and has semi-autonomous roving capabilities. It is powered by onboard lithium-polymer batteries and controlled via an Orangutan programmable robot controller, with video data and control signals transmitted through a tether to a ground station on the surface.
The fabrication process involved creating the rover body and wheels from ABS plastic, with aluminum endplates for durability. The body is hollow and air-filled to ensure buoyancy, while the wheels are designed to provide traction on ice. The tail, made from tape-measure spring steel, allows for flexibility during insertion into boreholes while maintaining rigidity for effective movement.
Testing of the prototype has been conducted in laboratory settings, both on ice sheets and underwater in inverted configurations. These tests demonstrated adequate traction and buoyancy, confirming the rover's capability for effective mobility in ice-water environments. The results from these tests have encouraged further development of a more robust prototype for potential deployment in field campaigns in Alaska and future NASA missions.
The document emphasizes the significance of this technology in expanding exploration capabilities in unique and extreme environments, showcasing JPL's commitment to innovation in robotic exploration. Overall, the Positive-Buoyancy Rover represents a significant advancement in the field of under-ice exploration, with potential applications in scientific research and environmental monitoring.