
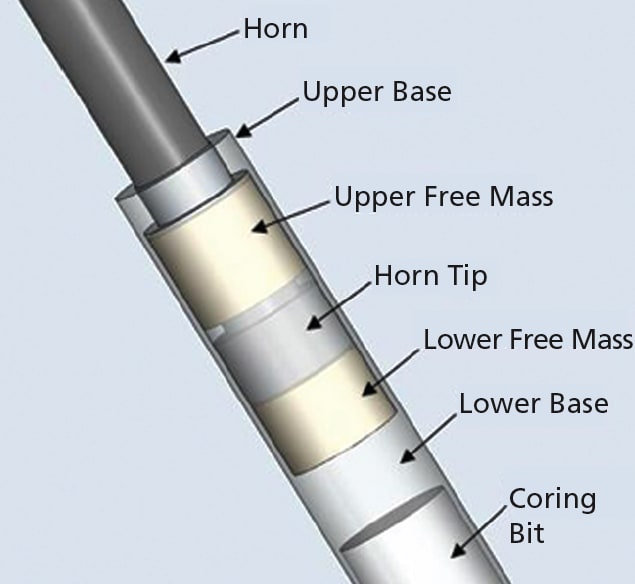
A shape reminiscent of a dog bone has been found to be superior to other shapes for mechanical-amplification horns that are components of piezoelectrically driven actuators used in a series of related devices denoted generally as ultrasonic/sonic drill/corers (USDCs). The first of these devices was reported in "Ultrasonic/Sonic Drill/Corers With Integrated Sensors" (NPO-20856), NASA Tech Briefs, Vol. 25, No. 1 (January 2001), page 38. The dog-bone shape was conceived especially for use in a more recent device in the series, denoted an ultrasonic/ sonic gopher, that was described in "Ultrasonic/Sonic Mechanisms for Drilling and Coring" (NPO-30291), NASA Tech Briefs, Vol. 27, No. 9 (September 2003), page 65. The figure shows an example of a dog-bone-shaped horn and other components of an ultrasonic gopher.
Prerequisite to a meaningful description of this development is an unavoidably lengthy recapitulation of the principle of operation of a USDC and, more specifically, of the ultrasonic/sonic gopher as described previously in NASA Tech Briefs. The ultrasonic actuator includes a stack of piezoelectric rings, the horn, a metal backing, and a bolt that connects the aforementioned parts and provides compressive pre-strain to the piezoelectric stack to prevent breakage of the rings during extension. The stack of piezoelectric rings is excited at the resonance frequency of the overall ultrasonic actuator. Through mechanical amplification by the horn, the displacement in the ultrasonic vibration reaches tens of microns at the tip of the horn.
The horn hammers an object that is denoted the free mass because it is free to move longitudinally over a limited distance between hard stops: The free mass bounces back and forth between the ultrasonic horn and a tool bit (a drill bit or a corer). Because the longitudinal speed of the free mass is smaller than the longitudinal speed of vibration of the tip of the horn, contact between the free mass and the horn tip usually occurs at a phase of the vibration favorable to transfer of momentum from the horn to the free mass. Therefore, the free mass picks up momentum and is accelerated back to the tool bit. Upon impact of the free mass on the tool bit, momentum is transferred to the tool bit. The impacts of the free mass on the tool bit repeat at a sonic frequency that can range from tens of hertz to about 1 kHz. The shock waves caused by the impacts of the free mass propagate to the interface between the tool bit and the medium (typically, rock, ice, or other brittle material) to be drilled or cored. The medium becomes fractured when its ultimate strain is exceeded at the medium/tool-bit interface. This concludes the description of the principle of operation.
The performances of several ultrasonic/ sonic gophers containing horns of different shapes were analyzed in a computational- simulation study. The computational simulation was based on a mathematical model that took account of interactions (1) between the piezoelectric stack and the driving circuit, (2) between the horn tip and the free mass, (3) between the free mass and the tool bit, and (4) between the tool bit and the medium to be cored or drilled. Inasmuch as it is necessary to keep the neutral plane of an actuator at the piezoelectric-stack/horn boundary to prevent breakage, the lengths of the horns and other parts of the actuators were adjusted accordingly. The equations of the model were solved numerically by finite-element analysis. The results of the analysis showed that relative to the other horn shapes, the dog-bone shape offers greater transfer of power to the medium to be drilled or cored.
Relative to the other horn shapes in the study, dog-bone shape offers a larger front area and a larger hammering mass that enhance actuation capability. The dog-bone shape also affords additional degrees of freedom for design and additional parameters for control. Yet another potential advantage of the dog-bone shape is that it lends itself readily to the addition of a second, upper free mass that would enable reverse hammering.
This work was done by Stewart Sherrit, Yoseph Bar-Cohen, Zensheu Chang, and Xiaoqi Bao of Caltech for NASA's Jet Propulsion Laboratory. For further information, contact