
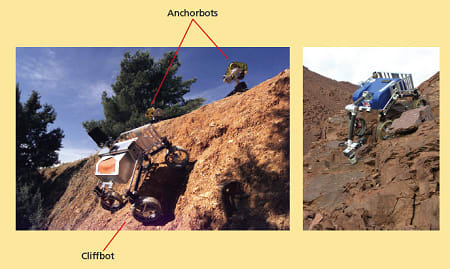
Teamed Robots for Exploration and Science in Steep Areas (TRESSA) is a system of three autonomous mobile robots that cooperate with each other to enable scientific exploration of steep terrain (slope angles up to 90°). Originally intended for use in exploring steep slopes on Mars that are not accessible to lone wheeled robots (Mars Exploration Rovers), TRESSA and systems like TRESSA could also be used on Earth for performing rescues on steep slopes and for exploring steep slopes that are too remote or too dangerous to be explored by humans.
Due to the interactive nature of the three-robot system, the robots must be very tightly coupled. To provide for this tight coupling, the TRESSA software architecture is built on a combination of (1) the multi-robot layered behavior-coordination architecture reported in “An Archi tecture for Controlling Multiple Robots” (NPO-30345), NASA Tech Briefs, Vol. 28, No. 10 (October 2004), page 65, and (2) the real-time control architecture reported in “Robot Electronics Architecture” (NPO-41784), NASA Tech Briefs, Vol. 32, No. 1 (January 2008), page 28. The combination architecture makes it possible to keep the three robots synchronized and coordinated, to use data from all three robots for decision-making at each step, and to control the physical connections among the robots. In addition, TRESSA (as in prior systems that have utilized this architecture), incorporates a capability for deterministic response to unanticipated situations from yet another architecture reported in “Control Architecture for Robotic Agent Command and Sensing” (NPO-43635), NASA Tech Briefs, Vol. 32, No. 10 (October 2008), page 40.
Tether tension control is a major consideration in the design and operation of TRESSA. Tension is measured by force sensors connected to each tether at the Cliffbot. The direction of the tension (both azimuth and elevation) is also measured. The tension controller combines a controller to counter gravitational force and an optional velocity controller that anticipates the motion of the Cliffbot. The gravity controller estimates the slope angle from the inclination of the tethers. This angle and the weight of the Cliffbot determine the total tension needed to counteract the weight of the Cliffbot. The total needed tension is broken into components for each Anchorbot. The difference between this needed tension and the tension measured at the Cliffbot constitutes an error signal that is provided to the gravity controller. The velocity controller computes the tether speed needed to produce the desired motion of the Cliffbot.
Another major consideration in the design and operation of TRESSA is detection of faults. Each robot in the TRESSA system monitors its own performance and the performance of its teammates in order to detect any system faults and prevent unsafe conditions. At startup, communication links are tested and if any robot is not communicating, the system refuses to execute any motion commands. Prior to motion, the Anchorbots attempt to set tensions in the tethers at optimal levels for counteracting the weight of the Cliffbot; if either Anchorbot fails to reach its optimal tension level within a specified time, it sends a message to the other robots and the commanded motion is not executed. If any mechanical error (e.g., stalling of a motor) is detected, the affected robot sends a message triggering stoppage of the current motion. Lastly, messages are passed among the robots at each time step (10 Hz) to share sensor information during operations. If messages from any robot cease for more than an allowable time interval, the other robots detect the communication loss and initiate stoppage.
This work was done by Ashley Stroupe, Terrance Huntsberger, Hrand Aghazarian, Paulo Younse, and Michael Garrett of Caltech for NASA’s Jet Propulsion Laboratory. NPO-44699
This Brief includes a Technical Support Package (TSP).
Cooperative Three-Robot System for Traversing Steep Slopes
(reference NPO-44699) is currently available for download from the TSP library.
Don't have an account?
Overview
The document discusses NASA's Cooperative Three-Robot System for Traversing Steep Slopes, known as TRESSA (Teamed Robots for Exploration and Science on Steep Areas). This innovative system addresses the limitations of traditional wheeled rovers, which can only traverse slopes of about 30 degrees due to stability and traction issues. TRESSA aims to provide planetary scientists with the ability to access steep terrains, enhancing geological investigations on planetary bodies like Mars.
The motivation behind TRESSA is to enable exploration of steep slopes that are currently inaccessible to traditional rovers, such as Spirit and Opportunity, which are limited to static stability at 45 degrees. TRESSA can navigate slopes up to 90 degrees by employing a cooperative approach with three robots: two Anchorbots positioned at the top of the slope and a Cliffbot that climbs the slope. The Anchorbots control safety lines that provide stability and prevent slipping, allowing the Cliffbot to move freely while being assisted against gravity.
The system's software architecture is built on real-time control and multi-robot behavior coordination, ensuring tight coupling among the robots. This architecture allows for synchronized operations, real-time decision-making, and effective communication among the robots. Each robot monitors its performance and that of its teammates to detect faults and prevent unsafe conditions. If any mechanical errors or communication failures occur, the system triggers an abort of the current motion to ensure safety.
TRESSA has been tested in field investigations, successfully traversing cliffs and collecting samples at Mars analog sites in Svalbard, Norway. The system's design not only enhances the ability to explore steep slopes but also demonstrates a novel approach to robotic teamwork, providing a self-contained solution that can be easily deployed and withdrawn from exploration sites.
In summary, TRESSA represents a significant advancement in robotic exploration technology, enabling access to challenging terrains and expanding the potential for scientific discovery on planetary bodies. By overcoming the limitations of traditional rovers, TRESSA opens new avenues for understanding geological processes and the history of planetary surfaces.