
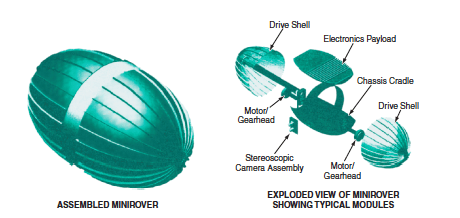
The figure depicts a proposed reconfigurable miniature exploratory robotic vehicle (mini- rover) that would serve as a versatile prototype in the development of exploratory robots and “smart”-sensor systems that contain them. For example, minirovers could serve as nodes of sensor webs — networks of spatially distributed autonomous cooperating robots — that have been contemplated for use in exploring large areas of terrain. [The concept of such networks was reported in more detail in “Sensor Webs” (NPO- 20616), NASA Tech Briefs, Vol. 23, No. 10 (October 1999), page 80.]
A minirover according to the proposal would serve as a test bed for the integration of component technological concepts into the design of a system at both the individual-sensor and the “smart”-sensor- web levels. Advances in propulsion, sensors, materials, microelectronics, and micro-manufacturing offer the potential for the economical construction of future small rovers and other autonomous vehicles, which, when deployed as a team, would exhibit behaviors characterized by the complexity, adaptability, and flexibility, of larger, single mobile robots that have been used previously.
Because one of the key design requirements for the proposed reconfigurable minirover is portability by a single human, its target design weight is 10 to 20 lb (corresponding to a mass between about 4.5 and 9 kg) and its target design footprint is 20 by 40 cm (about the size of a football). The design would be characterized by modularity, decoupling, flexibility, and simplicity. Simplicity would minimize the number of failure modes and make it possible to use uniform repair techniques. Decoupling would reduce the likelihood that failures of single components would cause failures of the entire rover or of the sensor web as a system. Flexibility would make it possible to use a small number of spare parts and/or software modules that could be connected in various ways to repair, rebuild, and/or reprogram the minirover.
Among the components of a reconfigurable minirover would be a mechanical frame, a strong, lightweight mast that could be folded into a small storage space, a computer, microcontroller, wireless modems, battery, a vision subsystem, and a bay in which scientific instrumentation would be installed. The mobility system of the minirover would include two drive shells that would act as wheels, driven by a motor and gear head. The shells could be pushed apart, when required, to deploy a scientific instrument or extend the mast.
The main advantage of the two wheeled design is the potential for mechanical robustness. Either an off-axle center of mass or a dragged tail would be used to create the necessary reaction torque. The tailless version would be more maneuverable on flat ground, while the tailed version would offer the greater reaction torque needed to traverse a steep slope. It would be easy to “armor” such a rover against impact, enabling such novel operations as ballistic deployment and imparting a high tolerance of impacts (such as those of falling off cliffs) caused by navigational errors.
This work was done by Ashitey Trebi-Ollennu and Brett Kennedy of Caltech for NASA’s Jet Propulsion Laboratory.
This Brief includes a Technical Support Package (TSP).
Minirovers as Test Beds for Robotic and Sensor-Web Concepts
(reference NPO-30342) is currently available for download from the TSP library.
Don't have an account?
Overview
The document outlines the development of a Reconfigurable MiniRover, designed by NASA's Jet Propulsion Laboratory, for use in smart sensor webs on planetary surfaces. This innovative robotic vehicle aims to facilitate missions involving autonomous cooperating robots and human-robotic communities, particularly for in situ science on Mars and other celestial bodies.
The Reconfigurable MiniRover is intended to serve as a test bed for integrating various component technologies at both the individual sensor level and the smart sensor web level. The design focuses on creating a network of small, lightweight, and inexpensive rovers that can operate with minimal power while being capable of multi-functional radio communication. Each rover is envisioned to have specialized capabilities, allowing for a diverse range of functionalities when combined into a larger system.
Key design requirements for the minirover include portability, with a target weight of 10 to 20 pounds (approximately 4.5 to 9 kg) and a footprint of 20 by 40 cm, similar to the size of a football. The design emphasizes modularity, flexibility, and simplicity, which are crucial for minimizing failure modes and ensuring ease of repair and reconfiguration. This approach aims to enhance the adaptability and complexity of the rover's operations, enabling it to perform tasks traditionally reserved for larger, single mobile robots.
The document also highlights advances in propulsion, sensors, materials, microelectronics, and micromanufacturing technologies, which present opportunities for economically constructing future small rovers and autonomous vehicles. When deployed as a team, these minirovers are expected to exhibit behaviors that closely mimic those of larger robots, thus expanding the capabilities of robotic exploration.
In summary, the Reconfigurable MiniRover represents a significant step forward in NASA's exploration strategies, focusing on the deployment of smart sensor webs that can efficiently explore and gather data from planetary surfaces. This initiative aligns with NASA's broader goals of enhancing robotic exploration and understanding of extraterrestrial environments, paving the way for future missions and scientific discoveries.