
An improved closed-loop controller has been built for a three-axis piezoelectric positioning stage. The stage can be any of a number of commercially available or custom-made units that are used for precise three-axis positioning of optics in astronomical instruments and could be used for precise positioning in diverse fields of endeavor that include adaptive optics, fabrication of semiconductors, and nanotechnology.
In a typical application, the stage is used to move an optic through a small distance with a required resolution of the order of a nanometer or a fraction of a nanometer. Typically, the piezoelectric actuator for each axis can be made to expand through a maximum stroke ≤12 μm by applying a potential ≤120 V to it. To provide position feedback for closed-loop control of the potential applied to the piezoelectric actuator for each axis, the expansion of the actuator is sensed by means of a strain gauge bonded to the side of the actuator. The resistance of the strain gauge changes from about 700 to 701 Ω as the actuator expands through its maximum stroke. The strain gauge is part of a Wheatstone bridge, so that the small change in resistance from a nominal value can be converted to a Wheatstone-bridge output voltage. To close the control loop, the Wheatstone-bridge output voltage is amplified and compared with a voltage representing an actuator set point specified by an external control computer or other external source. The difference between these voltages constitutes a servo error signal, which is amplified for application to the affected piezoelectric actuator.
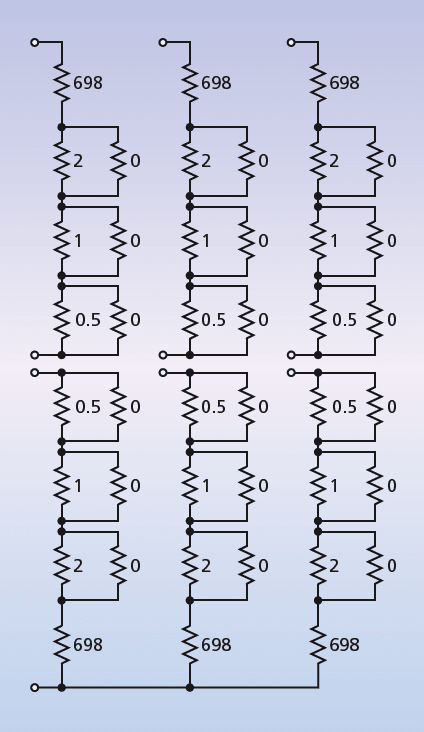
The improved controller supplants a prior controller that resided in a 19-in. (≈48-cm) rack. The most expensive part of the improved controller consists of servo-controller circuitry on a 4.25-by-7.5-in. (≈11-by-19-cm) printed-circuit board, denoted the main board. The strain gauges are connected into Wheatstone-bridge circuits that include relatively inexpensive, interchangeable resistor bridge circuits (see figure) on a 2.5-by-3.5-in. (approximately 6-by-9-cm) satellite printed-circuit board. The satellite board can readily be replaced by another with different circuitry tailored for a different actuator/strain-gauge combination.
The three Wheatstone bridges are driven by a precision voltage reference on the satellite board, powered by a cable from the main board. The voltages representing the actuator set points are generated by three 18-bit, self- calibrating, digital-to-analog converters on the main board. The amplification of the Wheatstone-bridge output voltages is effected by two-stage, low-noise instrumentation amplifiers on the main board.
The servo error signal for each axis is further amplified and filtered. The filter circuitry can be built to have either 2-Hz bandwidth (resulting in spatial resolution of 0.1 nm) or 200-Hz bandwidth (resulting in spatial resolution of 1 nm). The amplified, filtered signal is fed to a final high-voltage amplifier, the output of which is applied to the piezoelectric actuator. By means of a CMOS input on a control connector, some of the servo-controller circuitry can be bypassed, causing the actuators to operate in a rapid-motion, open-loop control mode.
One of the greatest advantages of improved controller over the prior controller arises from a low-noise design. The dominant component of noise is now Johnson noise from the strain gauges; the input-referred noise from all other components is lower by design. The lower-noise design makes it possible to refine spatial resolution from a prior limit of 1 nm to the present limit of 0.1 nm.
This work was done by Shanti Rao and Dean Palmer of Caltech for NASA’s Jet Propulsion Laboratory.
In accordance with Public Law 96-517, the contractor has elected to retain title to this invention. Inquiries concerning rights for its commercial use should be addressed to:
Innovative Technology Assets Management
JPL
Mail Stop 202-233
4800 Oak Grove Drive
Pasadena, CA 91109-8099
E-mail: This email address is being protected from spambots. You need JavaScript enabled to view it.
Refer to NPO-44806, volume and number of this NASA Tech Briefs issue, and the page number.
This Brief includes a Technical Support Package (TSP).
Improved Controller for a Three-Axis Piezoelectric Stage
(reference NPO-44806) is currently available for download from the TSP library.
Don't have an account?
Overview
The document outlines NASA's development of an improved controller for a three-axis piezoelectric stage, designated as NPO-44806. This technology is particularly relevant for applications requiring precise movement of optics over very small distances, such as in interferometry. The controller utilizes piezoelectric actuators made from PZT (lead-zirconate-titanate) crystals, which can expand up to 12 microns when subjected to a voltage of up to 120V. Each actuator is equipped with a strain gauge that detects motion, with resistance changes from approximately 700 Ohms to 701 Ohms as the actuators expand.
The main circuit board of the controller features a high-voltage amplifier using a PA78 op-amp, with a compact size of 4" x 7" and a power consumption of 5W across three channels. It supports a control interface via a PC parallel port and offers an 18-bit position control with a Johnson noise limit of 0.1 nm at 2Hz. The system is designed to operate within a bandwidth of 2Hz to 200Hz, which can be selected during assembly.
A significant challenge addressed in this design is the hysteresis of the actuators, which can lead to unacceptable length changes if the voltage is held constant. To mitigate this, the controller employs a feedback loop that continuously adjusts the voltage based on the strain gauge readings. The resistance-to-voltage conversion occurs on a separate satellite circuit board featuring a Wheatstone bridge, powered by a precision voltage reference.
The controller's design allows for high-speed operations through an open-loop mode, which can be selected for all three channels. This mode reduces feedback control, enabling faster actuator movements when necessary. The system also includes a self-calibrating digital-to-analog converter (DAC) that simplifies the setup process and enhances reliability.
Overall, this improved controller represents a significant advancement over existing piezo servo-controllers, offering a smaller footprint, lower noise levels, and interchangeable components tailored for specific strain gauge sensors. The document emphasizes the potential applications of this technology in various scientific and commercial fields, highlighting NASA's commitment to innovation in aerospace-related developments.