This rover would maneuver on terrain by altering its shape.
Goddard Space Flight Center, Greenbelt, Maryland
A proposed mobile robot, denoted the amorphous rover, would vary its own size and shape in order to traverse terrain by means of rolling and/or slithering action. The amorphous rover was conceived as a robust, lightweight alternative to the wheeled rover-class robotic vehicle heretofore used in exploration of Mars. Unlike a wheeled rover, the amorphous rover would not have a predefined front, back, top, bottom, or sides. Hence, maneuvering of the amorphous rover would be more robust: the amorphous rover would not be vulnerable to overturning, could move backward or sideways as well as forward, and could even narrow itself to squeeze through small openings. Examples of potential terrestrial applications of the amorphous rover include exploration or military reconnaissance on rough terrain, inspection inside narrow tunnels, and searching for victims trapped in rubble of collapsed buildings.
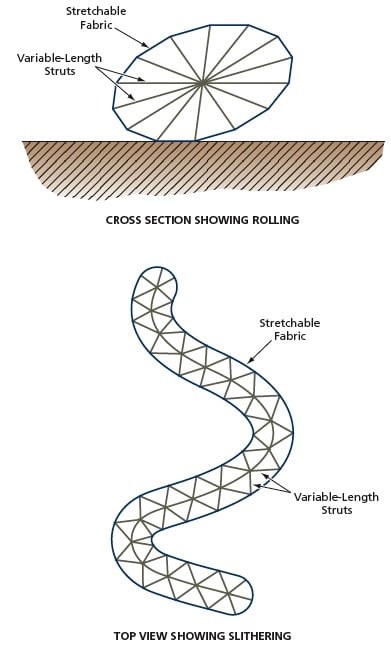
Figure 1. A Tetrahedral Mesh of Variable-Length Struts would be enclosed bya stretchable fabric. Struts would be lengthened and/or shortened in coordinationto effect rolling and/or slithering. The main structure of the amorphous rover would consist of a tetrahedral mesh of nodes connected by variable-length struts, covered with a stretchable fabric connected to the outer nodes (see Figure 1). The rolling and/or slithering action would be effected through coordinated lengthening and shorting of the struts. Inasmuch as there would be no head, visual and/or other data needed for navigation would be obtained by means of a distributed sensor network inside the structure. A sample for return could be collected by a process, illustrated in Figure 2, that would lead to retention of the sample in a tetrahedral compartment defined by stretchable fabric covering all its faces.
Figure 2. A Sample Would Be Collected by momentarily retracting the fabricfrom one of the outer faces, rotating so that a tetrahedral compartmentthat includes the open face contains the sample, re-extending thefabric to cover the outer face and trap the sample inside, then rollingaway from the collection position. The amorphous rover could, in principle, be designed and built using currently available macroscopic electromechanical components. In addition, the basic amorphous- rover concept admits of a numerous design variations, including ones involving extreme miniaturization through exploitation of microelectromechanical systems (MEMS), nanoelectromechanical systems (NEMS), and perhaps even the use of carbon nanotubes. Any or all of these variations could include control systems based on evolvable neural software systems.
This work was done by Steven A. Curtis of Goddard Space Flight Center. For further information, contact the Goddard Innovative Partnerships Office at (301) 286-5810. GSC-14850-1