
Synthetic bursae are under development for incorporation into robot joints that are actuated by motor-driven cables in a manner similar to that of arthropod joints actuated by muscle-driven tendons. Like natural bursae, the synthetic bursae would serve as cushions and friction reducers.
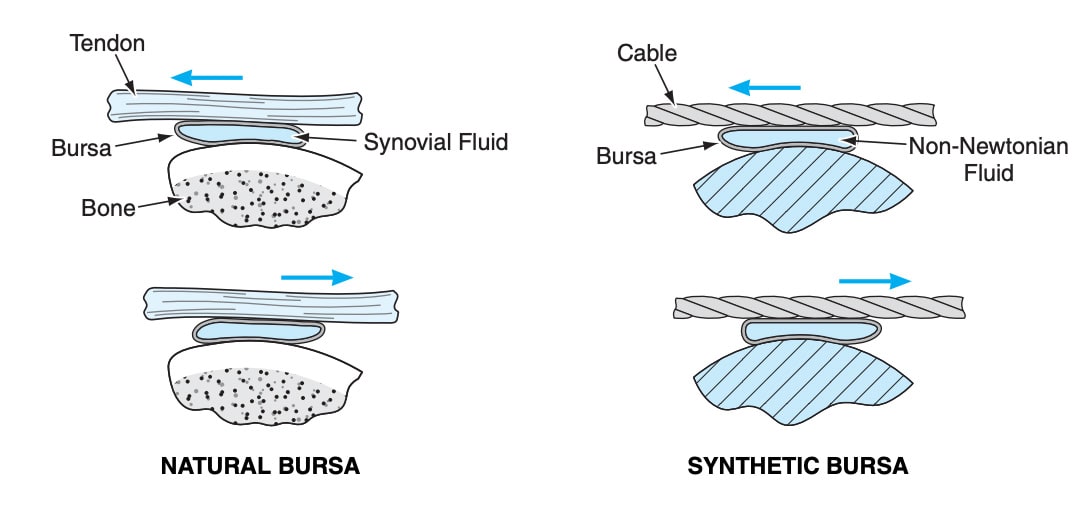
A natural bursa is a thin bladder filled with synovial fluid, which serves to reduce friction and provide a cushion between a bone and a muscle or a tendon (see figure). A synthetic bursa would be similar in form and function: It would be, essentially, a compact, soft roller consisting of a bladder filled with a non-Newtonian fluid. The bladder would be constrained to approximately constant volume. The synthetic bursa would cushion an actuator cable against one of the members of a robot joint and would reduce the friction between the cable and the member. Under load, the pressure in the bladder would hold the opposite walls of the bladder apart, making it possible for them to move freely past each other without rubbing.
A synthetic bursa could be made by fabricating a bladder from a composite of lock-woven mesh and strong elastomer and filling the bladder with a non-Newtonian fluid. Depending on the specific application, it could be advantageous to use a dilatant or a thixotropic fluid. Ideally, a synthetic bursa would be designed so that it would bottom out before reaching its bust pressure. In the bottomed-out condition, the opposite walls would slide past each other on an almost capillary film of the non-Newtonian fluid.
At the time of reporting the information for this article, prototype synthetic bursae with simple spherical shapes were being fabricated. Subsequent prototypes would have more complex shapes somewhat like those of natural bursae.
This work was done by Christopher S. Lovchik of Johnson Space Center. For further information, contact the Johnson Commercial Technology Office at (281) 483-3809.
MSC-23064.