
An electromechanical hand-and-forearm assembly has been developed for incorporation into an anthropomorphic robot that would be used in outer space. The assembly is designed to offer manual dexterity comparable to that of a hand inside an astronaut's suit; thus, the assembly may also be useful as a prosthesis or as an end effector on an industrial robot.
The assembly has a total of 14 degrees of freedom. It consists of a forearm, which houses the motors and drive electronics; a two-degree-of-freedom wrist; and a five-finger, 12-degree-of-freedom hand. The hand itself is broken down into two sections: a dexterous work set, which is used for manipulation, and a grasping set, which allows the hand to maintain a stable grasp while manipulating or actuating a given object. The dexterous set consists of two three-degree-of-freedom fingers (pointer and index) and a three-degree-of-freedom opposable thumb. The grasping set consists of two, one-degree-of-freedom fingers (ring and pinkie) and a palm.
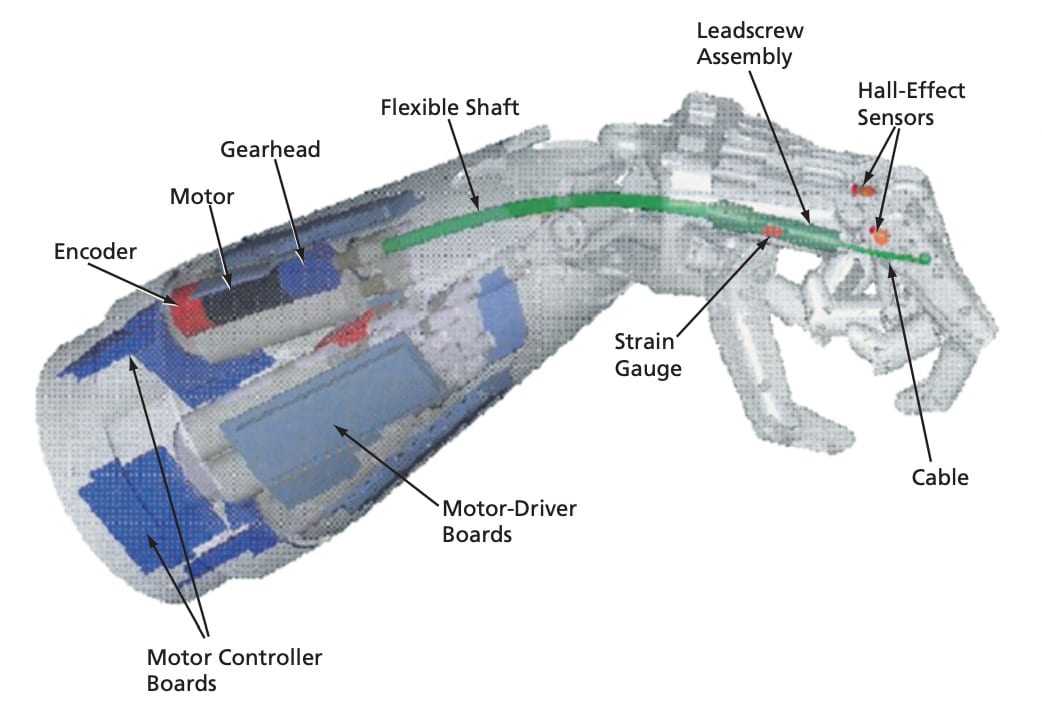
The fingers are powered by motors mounted in the forearm (see figure). Mechanical power for the fingers is transmitted through the wrist via flex shafts. In the hand, small modular leadscrew assemblies convert the rotary motion of the flex shafts to linear motion. The outer shells of the leadscrew assemblies are instrumented as load cells to provide force feedback.
The leadscrews are linked to the fingers by short cables that lie in cammed grooves in the fingers. The use of cables reduces (in comparison with the use of gears or other drive mechanisms) the size and complexity of the fingers while allowing the fingers to be very compliant in the non-driven direction. The cammed grooves keep the bend radii of the cables large to prevent excessive stressing of the cables.
Two leadscrew assemblies that work in a differential manner drive the two-degree-of-freedom base joint of the dexterous fingers. The two distal pitch joints of these fingers are linked and driven by a third leadscrew assembly through a decoupling link in the base of the finger. The thumb is driven in a manner similar to that of the dexterous fingers, except that the base joints are skewed and the yaw is exaggerated in order to match the motion of the human thumb. In the gripping fingers, all three degrees of freedom are linked and are driven by one leadscrew assembly. Both of the gripping fingers are mounted on pivoting bases and driven by another leadscrew assembly in order to enable the palm to cup inward, allowing the hand to conform to an object being held.
The wrist is designed as a large open hook joint (to allow the flexible shafts to pass through) and is driven by two linear actuators. The forearm is 4 in. (≈10 cm) in diameter at the base and 8 in. (≈20 cm) long.
This work was done by Christopher S. Lovchik of Johnson Space Center. This invention is owned by NASA, and a patent application has been filed. Inquiries concerning nonexclusive or exclusive license for its commercial development should be addressed to
the Patent Counsel
Johnson Space Center
(281) 483-0837.
Refer to MSC-22883.