
A small robot that travels by hopping has been built and tested. This is a prototype of hopping robots that would carry video cameras and possibly other sensory devices and that are under consideration for use in exploring cluttered, unpredictable terrain on distant planets. On Earth, robots like this one might have value for entertainment and civilian and military reconnoitering of hazardous areas.
The design of this robot is a compromise between functionality on the one hand and simplicity, reliability, and lightness of weight on the other hand. The robot is said to be minimally actuated in that all motions are generated by use of a single motor that drives several mechanisms.
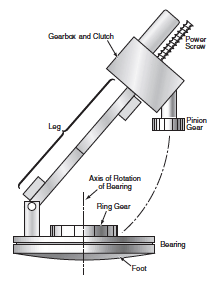
The robot (see Figure 1) includes a foot, a bearing on the foot, and a tilted assembly that contains the rest of the robot. The tilted assembly can be pivoted on the bearing to pan the camera and to steer the robot for the next hop. The tilted assembly includes an extendable leg that contains a spring and an associated linkage for extending and retracting the leg. To store energy for the next hop, the motor drives a power screw that compresses the spring and retracts the leg. At the desired moment of hopping, the motor actuates a mechanism that releases the spring, which then rapidly extends the leg to generate the hopping motion. The spring and linkage are designed together to make the extension force a nonlinear function of displacement that maximizes the proportion of spring-compression energy converted to hopping kinetic energy.
The masses of the components are distributed so as to make the robot bottom-heavy for stability when it sits upright on the foot with its main assembly tilted and the leg compressed in preparation for hopping. Because the robot can be expected to lie toppled over after most hops, a self-righting mechanism is included. The self-righting mechanism deploys flaps to push the robot to the stable upright orientation.

To take advantage of minimal actuation, it is necessary to perform most operations sequentially rather than simultaneously. Hence, the robot must operate in cycles. To enable the single motor to effect the desired sequence of motions, the motor is coupled to the various actuator mechanisms by use of a variety of coupling mechanisms that include an overrunning clutch and timing and logic mechanisms. The sequence of motions during one cycle is the following:
- Assuming that the robot has just landed from the preceding hop, the self-righting mechanism is actuated in a two-phase operation.
- During the second phase of the self-righting operation, the spring is compressed and the leg retracted in preparation for the next hop. Because retraction of the leg restores the bottom-heavy configuration, it aids self-righting. Figure 2 depicts a sequence of events from flight through landing and self-righting.
- The spring is locked in compression to prevent premature hopping.
- The tilted assembly is rotated to steer for the next hop and to pan the camera.
- The spring is released to make the robot hop.
This work was done by Paolo Fiorini, Joel Burdick, Eric Hale, and Nathan Schara of Caltech for NASA’s Jet Propulsion Laboratory.
This Brief includes a Technical Support Package (TSP).
Minimally Actuated Hopping Robot
(reference NPO-20911) is currently available for download from the TSP library.
Don't have an account?
Overview
The document discusses a prototype of a minimally actuated hopping robot developed by researchers at NASA's Jet Propulsion Laboratory (JPL). This robot is designed to traverse cluttered and unpredictable terrains, making it suitable for exploration on distant planets as well as for applications on Earth, such as entertainment and reconnaissance in hazardous areas.
The robot operates using a single motor that drives various mechanisms, emphasizing simplicity, reliability, and lightweight design. Its structure includes a foot, a bearing on the foot, and a tilted assembly that houses the main components. The tilted assembly can pivot on the bearing, allowing it to pan a camera and steer for the next hop. A key feature of the robot is its extendable leg, which contains a spring and linkage system for energy storage and leg movement.
The hopping mechanism is activated through a sequence of operations. Initially, after landing, the robot uses a self-righting mechanism to return to an upright position. This mechanism deploys flaps to assist in stabilizing the robot. Following this, the spring is compressed to store energy for the next hop, and the leg is retracted to maintain a bottom-heavy configuration, which aids in self-righting. The motor then locks the spring in compression to prevent premature hopping. Finally, the assembly is tilted to prepare for the next hop, and the spring is released to propel the robot into the air.
The design of the robot is a compromise between functionality and the need for a lightweight, reliable system. The nonlinear function of the spring's extension force maximizes the energy conversion from spring compression to kinetic energy during hopping. The robot's ability to operate in cycles, performing actions sequentially rather than simultaneously, is crucial for its minimal actuation.
Overall, this hopping robot represents a significant advancement in robotic design, showcasing innovative engineering solutions for mobility in challenging environments. The work was conducted by a team of researchers, including Paolo Fiorini, Joel Burdick, Eric Hale, and Nathan Schara, under NASA's sponsorship, highlighting the collaborative efforts in advancing robotic technology for exploration and practical applications.