

Soft robots are often made of compliant, easy-to-deform materials, which usually means...soft robots are slow.
To move quickly on land or in water, robots require a large reaction force from the surface — a mechanical challenge when a robotic body's material changes shape easily.
That's why so many previous generations of soft robots are crawlers, with part, if not all, of their bodies, consistently keeping contact with the surface.
To address the speed limitations of soft robots, Jie Yin, an assistant professor of mechanical and aerospace engineering at North Carolina State University , and his team looked to one of the highest standards in the animal kingdom: The cheetah.
The researchers' new proof-of-concept robot has a faster gait that avoids the usual crawl.
"We are trying to make the soft robot be capable of galloping like a cheetah to jump off the ground to reduce the contact time with the ground to achieve high speed," Prof. Yin told Tech Briefs.
The bio-inspired systems are known as "LEAP" robots, which stands for “Leveraging Elastic instabilities for Amplified Performance."
After studying the cheetah's extending and flexing spine, the N.C. state engineers created a bistable backbone for their 7-centimeter-long, 45-gram soft robot. Upon actuation, the robo-spine quickly bends and unbends between two stable states.
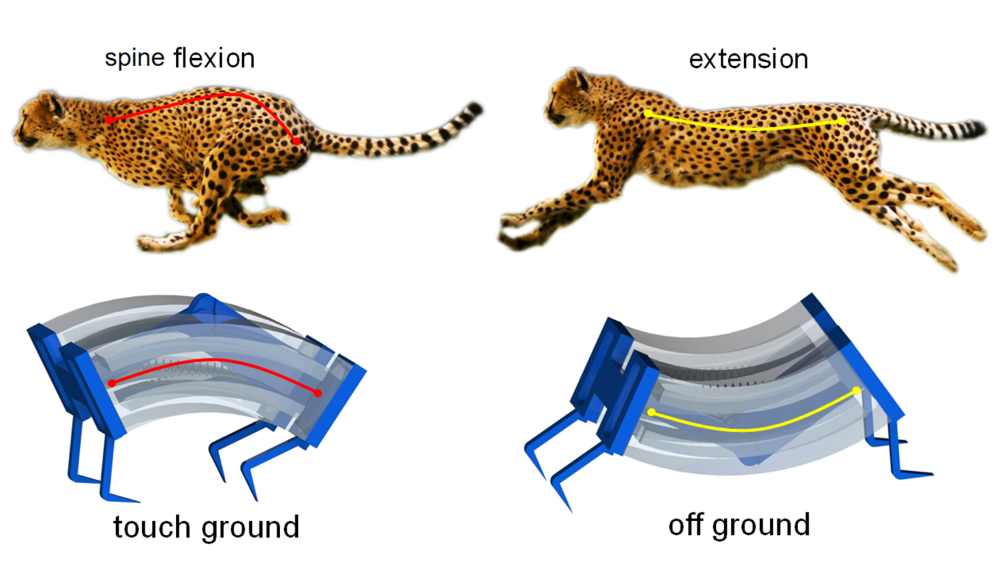
The flexible spine features a spring hinged by two links. The pre-stretched spring provides stored mechanical energy that can quickly release as the spine switches between each state.
Spine movement is driven by the robot's connected bi-directional pneumatic actuators, which are soft and bending. The spring's release of mechanical energy mimics the flexion and extension in a cheetah's spine.
The robot's quick response time generates a high dynamic impact force from both ground and water, which propels the soft robot at a faster rate: approximately 2.7 body lengths per second.
{youtube} https://www.youtube.com/watch?v=Z5QAwAOxORo {/youtube}
A cheetah moves at 16 body lengths per second.
In a short Q&A with Tech Briefs below, Prof. Yin explains how his team's next step is an ambitious one: Beat the cheetah.
Tech Briefs: Why is it valuable for a spine to be “bistable” or have two stable states?
Prof. Jie Yin: The bistable spine is like an electric switch; it is either on or off and has no intermediate state, which represents two stable states of either bending upward or bending downward. It never stays as a straight spine since it is an unstable state.
[The robotic spine] will quickly switch between two stable states under actuation. Meanwhile, the soft body quickly bends up or down to extend or contract its stride length to mimic the galloping gait to jump off the ground through quick release of the stored energy.
For sure, the spine of a cheetah is not bistable, but it is flexible. A cheetah's spine bends up and down during galloping by pulling or releasing its muscle in the spine. So, this research is bio-inspired by the movement of the flexible spine during a cheetah's galloping.
Tech Briefs: How durable are these robots? What are the ranges of their speed and lifting capabilities?
Prof. Jie Yin: The durability of the robots are good. The robots can run thousands of cycles without obvious degradation in their performance, due to the superelasticity in their materials and linear elastic spring under small actuation pressure of less than 60 kPa. The speed is tunable to be slow or fast, which can be around 0.5 to 2.7 body lengths/second (absolute velocity is 40 - 190 mm/s). Lifting capability is also tunable in the range of 0.02 g to 11.4 kg.
Tech Briefs: This is a proof-of concept. What’s next? What are the most exciting possibilities to you, with this kind of technology?
Prof. Jie Yin: The cheetah's speed is 16 body lengths/second. Now our proof-of-concept soft robot is only 2.7 body length/second, which is over 5 times slower. Our next step and ambitious goal is to beat the cheetah in terms of relative speed by scaling down the robot size to insect-size or even microscale size.
We believe that the same working principle will work under a small scale, and the soft robot will become untethered and autonomous through other remote actuation methods, like magnetic fields, which could potentially move inside the human body for quick drug delivery or minimally invasive surgery.
We are also very open for potential collaboration with industries.
What do you think of the cheetah-inspired soft robot? Share your questions and comments below.
The paper, “ Leveraging elastic instabilities for amplified performance: spine-inspired high-speed and high-force soft robots ,” is published in the journal Science Advances. First author of the paper is Yichao Tang, a former Ph.D. student of Jie Yin’s when Yin was on faculty at Temple University. The paper was co-authored by Yinding Chi, a Ph.D. student at NC State; Omid Maghsoudi and Andrew Spence of Temple; Jiefeng Sun and Jianguo Zhao of Colorado State University; and Tzu-Hao Huang and Hao Su of the City University of New York.
Transcript
No transcript is available for this video.