
Robots have traditionally had a tough time handling cables. The objects' thin, flexible shape has frequently escaped the grasp of robotic grippers.
Researchers from the Massachusetts Institute of Technology (MIT), however, have developed a new way of taking hold of the wires.
The MIT method, which combines a two-fingered gripper and a perception-and-control sensor framework, opens up possibilities for both industrial and household applications.
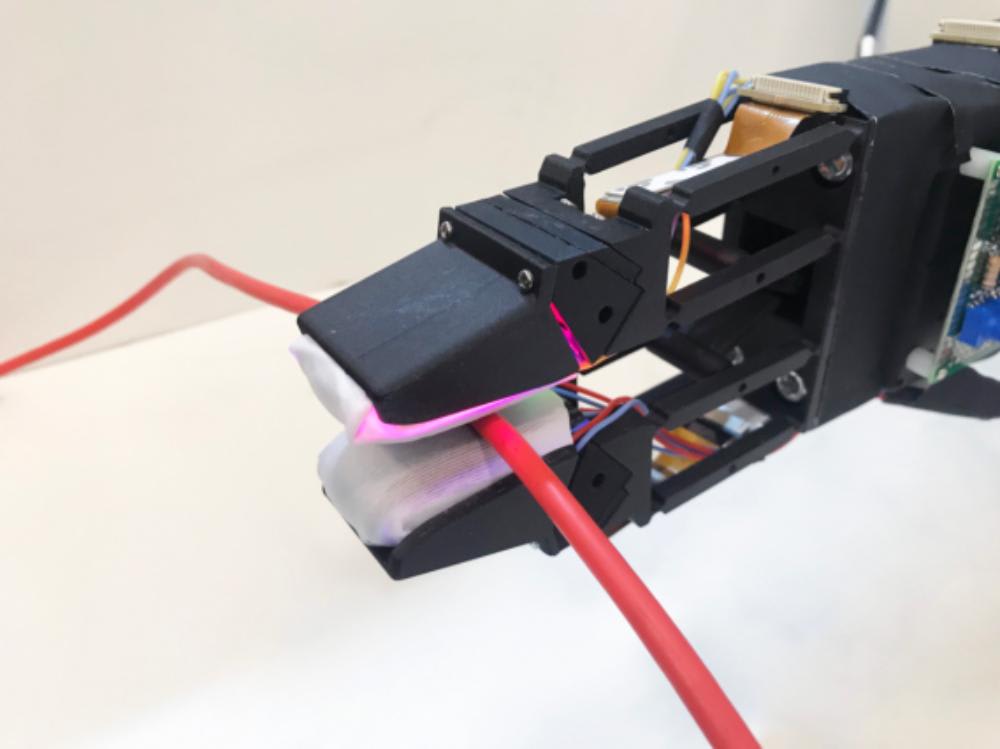
A vision-based “GelSight” sensor offers real-time tactile feedback, estimating the position and orientation of the cable in the grip, as well as friction forces as the cable slides.
The robot can therefore adjust its pose and and applied-force in real-time, to keep a cable in its grasp.
A cable grip controller regulates gripping force, to keep frictional sliding forces at a reasonable level. Additionally, a cable pose controller, using a learned linear model of cable sliding dynamics, keeps the wire centered and aligned on the robot’s fingertips to prevent the cable from being released.
The “GelSight” sensors , located at the tips of the robotic fingers, are built from soft rubber and contain embedded cameras. The gripper is mounted on a robot arm, which can move as part of the control system.
The reactive gripper allows a robot to follow one meter of cable in random configurations within two to three hand grasps. The system adapts to cables of different materials and thicknesses.
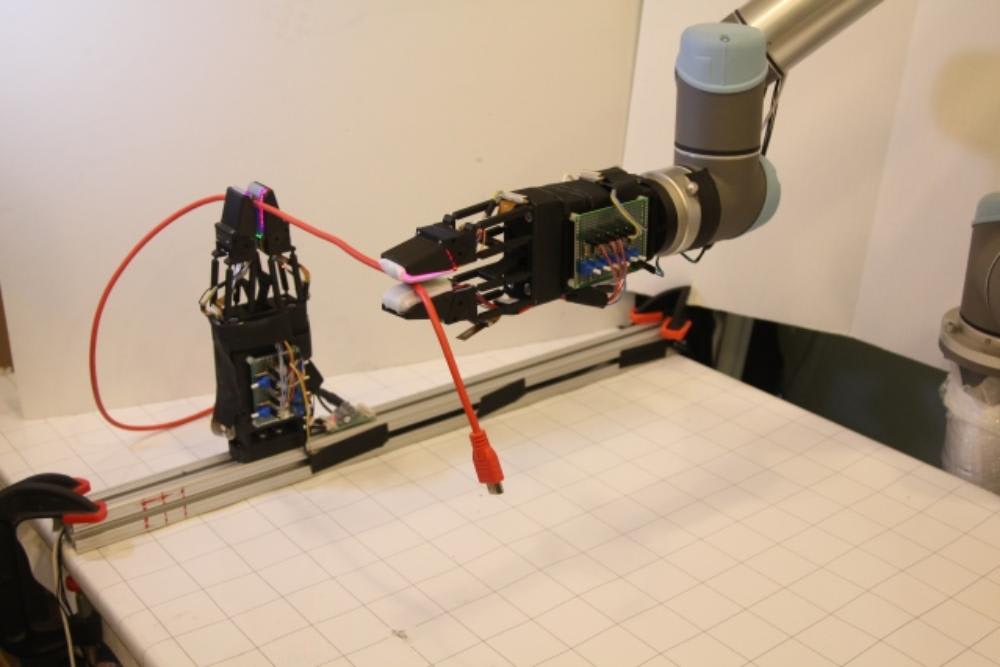
The research team, led by MIT postdoc Yu She, demonstrated a task we're all familiar with: A robot handled a headphone cable, slid the fingers to the jack connector, and plugged in. That kind of everyday task is only the beginning of the gripping possibilities, according to She.
“Manipulating soft objects is so common in our daily lives, like cable manipulation, cloth folding, and string knotting,” said She in a recent MIT news release . “In many cases, we would like to have robots help humans do this kind of work, especially when the tasks are repetitive, dull, or unsafe.”
In a short, edited interview with Tech Briefs below, She explains how such precise gripping ability may come in handy, both in the factory and around the house.
Tech Briefs: Why has handling cable been a particularly challenging task for robots?
Yu She: Cables are so complex because they are so soft and they can deform into any shape. And cable modeling is also very challenging due to its deformable property. In addition, traditional tactile sensors can only estimate very limited information on complex cables. Without knowing the full state of the cable, traditional solutions are very challenging to manipulate cables.
Tech Briefs: What was the important “breakthrough,” technologically, that allowed you and your team to make the task of handling cables possible?
Yu She: First, our new tactile sensor can capture high dimensional information and can predict all states of the cables that were being grasped in the robotic gripper.
Second, we leveraged the perception feedback from our tactile sensor and developed two controllers to make sure the cable remains inside of the gripper, and that the grip force is just right for cable manipulation. The force cannot be too large or too small.
Third, we customized the gripper such that the gripper is fast enough to run the aforementioned controllers in real-time, which is very important for cable manipulation.
The aforementioned three components are referred to as perception, control, and design respectively. We integrated and coupled these three components together in a systematic way. Although none of the three components are super complex, their organic integration is super powerful and can address very challenging tasks such as cable manipulation.
Tech Briefs: What was your reaction when you saw the robotic gripper plug in headphone cables?
Yu She: When I saw the gripper plug in the headphone cables, I realized that robotic grippers with purely tactile perception can do really complex tasks.
I immediately thought about cable manipulation applications in deep space and deep sea, where it is expensive to have human operators and we could instead have robots do the cable manipulation task.
Tech Briefs: What kinds of other exciting applications do you envision with this technology?
Yu She: I expect the technology has extensive applications for autonomous cable manipulations, such as industry cable manufacturing and assembling, household cable sorting, and arranging. The technique has the potential to be used to manipulate any deformable objects. Applications could also include folding clothes, doing laundry, assisted-dressing, and gripping fruits.
Tech Briefs: What will you be working on next, to push the technology forward?
Yu She: Our next step will be to study more complex cable manipulation tasks such as cable routing and cable inserting through obstacles. We look for applications of autonomous cable manipulation in the auto industry. We will also study on manipulating more complex objects like fabric, clothes, and fruits.
Yu She wrote the research paper alongside MIT PhD students Shaoxiong Wang, Siyuan Dong, and Neha Sunil; Alberto Rodriguez, MIT associate professor of mechanical engineering; and Edward Adelson, the John and Dorothy Wilson Professor in the MIT Department of Brain and Cognitive Sciences.
This work was supported by the Amazon Research Awards, the Toyota Research Institute, and the Office of Naval Research.
What do you think? Share your questions and comments below.
Transcript
00:00:00 [MUSIC PLAYING]