
While soft robots hold promise in applications ranging from search-and-rescue efforts to wearable exoskeletons, the technologies are often held back by the electronics, says William Grover, a professor and roboticist at UC Riverside.
The robots are controlled by power-intensive components that take up space: valves, circuits, and batteries.
To free up the soft robots and increase their overall use, Grover and his team want to swap out the electronics with a lighter option: Air .
"If we can replace this electronic control hardware with air-powered hardware, the whole robot becomes simpler and cheaper and safer because it all runs on the same power: air power," Grover told Tech Briefs in a Q&A below. "I think that can be a game-changer in finally getting soft robotic technology into our day-to-day lives."
The UC Riverside team developed computer memory, run by air.
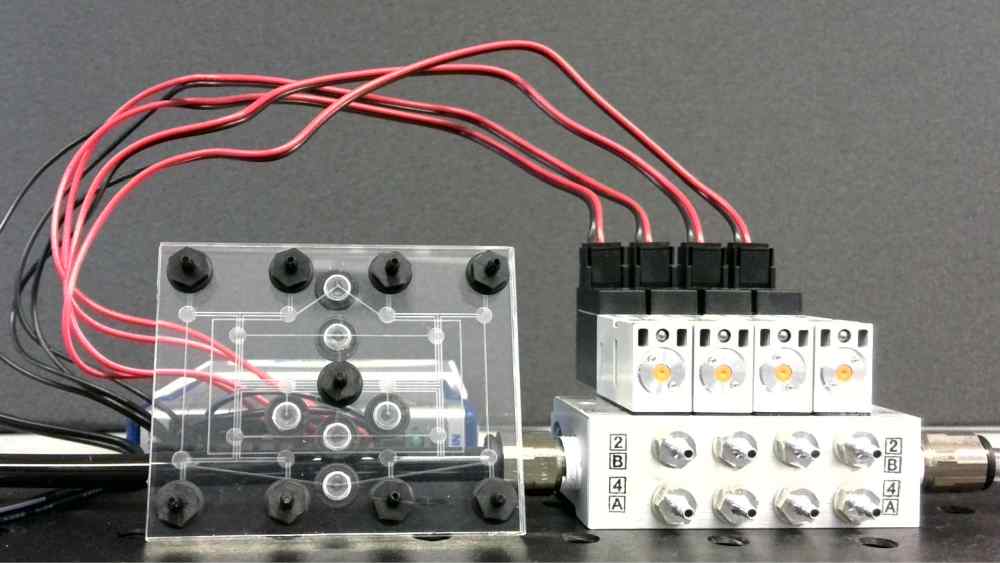
What is Pneumatic Logic?
With a machine built around pneumatic logic, it is air, not electricity, that flows through circuits or channels. Pneumatic valves control the airflow, and the resulting movement of molecules toward an actuator providing the force and power.
The air pressure represents the "on/off" or "true/false" logic states that trigger or halt electrical charges in modern computers.
Pneumatic logic supported a variety of products in the early parts of the 20th century, from thermostats to self-playing pianos.
In fact, the UC Riverside researchers used pneumatic random-access memory, or RAM, to get a robot to make some music.
Robot Music, And Other Applications
By varying the combinations of atmospheric pressure and vacuum within the channels on the RAM chip, the researchers were able to make the robot play notes, chords, and even a whole song — “Mary Had a Little Lamb” — on a piano. (See the video below.)
To get the tunes going, Grover and colleagues at the university made their pneumatic RAM chip by replacing electronic transistors with microfluidic valves. The valves remain sealed against a pressure differential, even when disconnected from an air supply line, creating trapped pressure differentials that function as memories and maintain the "true/false" or "on/off" states of a robot’s actuators.
The demonstration, described in a paper titled “ A pneumatic random-access memory for controlling soft robots ,” was supported by the National Science Foundation and led by bioengineering doctoral student Shane Hoang, Grover, computer science professor Philip Brisk, and mechanical engineering professor Konstantinos Karydis.
After modifying the microfluidic valves to handle larger air flow rates, the team produced an 8-bit pneumatic RAM chip able to control larger and faster-moving soft robots, and incorporated it into a pair of 3D-printed rubber hands. The pneumatic RAM uses atmospheric-pressure air to represent a “0” or "false" value, and vacuum to represent a “1” or "true" value.
The soft, piano-playing robotic fingers are extended when connected to atmospheric pressure and contracted when connected to vacuum.
Aside from simple music, the UC Riverside system could be used to operate other robots, with no electronics and only a battery-powered pump to create a vacuum.
The options is a safer one, according to the researchers. Without positive pressure anywhere in the system — only normal atmospheric air pressure — there is no risk of accidental overpressurization and violent failure of the robot or its control system.
Robots using this technology would be especially safe for delicate use on or around humans, they say, such as wearable devices for infants with motor impairments.
Prof. Grover has high hopes for air power. Read our short Q&A with Tech Briefs below to learn more.
Tech Briefs: Why is “air-powered computer memory” such an important achievement?
Prof. William Grover: Well, it isn’t for everything — I don’t think I’ll be writing emails on an air-powered computer any time soon! But for some applications, replacing electronic computing hardware with air-powered hardware makes a lot of sense.
Soft robots are a great example of this. Lots of researchers have developed air-powered soft robots for all kinds of exciting and important applications, but these soft robots haven’t become very widespread. One big reason for that is the electronic hardware currently used to control these robots.
Even though these air-powered robots might be inexpensive to build and safer to use around people and in extreme environments, they’re often controlled by the same expensive, power-hungry, and bulky electronic valves, circuits, batteries, and other hardware that’s used in “normal” robotics. This electronic hardware holds soft robots back; it keeps them from being used in a lot of important applications.
If we can replace this electronic control hardware with air-powered hardware, the whole robot becomes simpler and cheaper and safer because it all runs on the same power, air power. I think that can be a game-changer in finally getting soft robotic technology into our day-to-day lives.
Tech Briefs: What kinds of applications do you envision for this kind of air-controlled robotics?
Prof. William Grover: There’s a long history of researchers proposing air-powered soft robots for all sorts of applications, and I think that our technology has the potential to make all of those applications more feasible. Certainly healthcare is a great application area for soft robots — think Baymax in “Big Hero Six” — but also wearable soft exoskeletons that can assist people with conditions that make it hard for them to control their movements on their own. I think that our technology could make those soft healthcare devices a lot cheaper, lighter, safer, and more user-friendly than they are today.
Another interesting application area is hazardous environments: places like chemical plants or mining facilities, where an electronic robot might create a spark and cause an explosion or fire. An air-powered and air-controlled robot would be far safer in places like these.
Tech Briefs: What are the risks or downsides of controlling robots with air, compared to tried-and-true electronics?
Prof. William Grover: An air-powered computer would always be slower than an electronic computer, because air fundamentally flows a lot slower than electricity. But for a lot of robotic applications that don’t require super-high-speed movement, I think that air-powered computers would still be fast enough. Also, right now our pneumatic RAM runs on vacuum (air pressure lower than atmospheric pressure), so that puts a limit on how strong the controlled robots can be — we’re limited to one atmosphere of pressure. But we’re currently working on versions of our pneumatic RAM that can control higher pressures, for controlling stronger robots.
Tech Briefs: What’s next for you, with this work?
Prof. William Grover: We’re in a bioengineering department, so we’re always interested in biomedical applications for our tech. We’re looking at some common medical tools and seeing if they could be made better using air-powered control instead of computers and electronics. If they can, that might make these medical tools more suitable for use in poorer parts of the world without reliable electricity.
What do you think? Share your questions and comments below.
Transcript
No transcript is available for this video.