
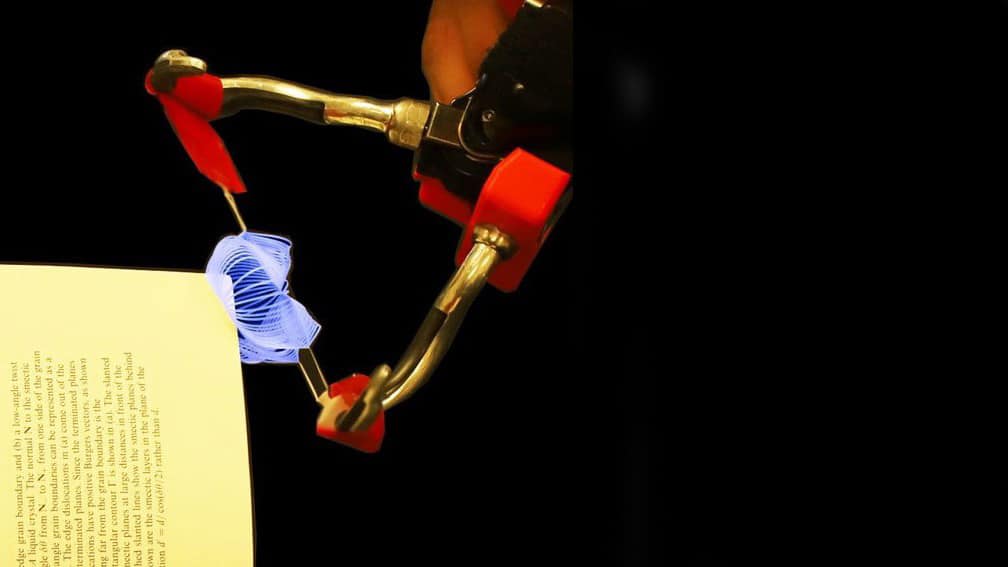
Researchers at North Carolina State University have developed a robotic gripping device that is gentle enough to pick up a drop of water, strong enough to pick up a 14.1-pound weight, dexterous enough to fold a cloth, and precise enough to pick up microfilms that are 20 times thinner than a human hair.
In addition to possible manufacturing applications, the researchers also integrated the device with technology that allows the gripper to be controlled by the electrical signals produced by muscles in the forearm, demonstrating its potential for use with robotic prosthetics.
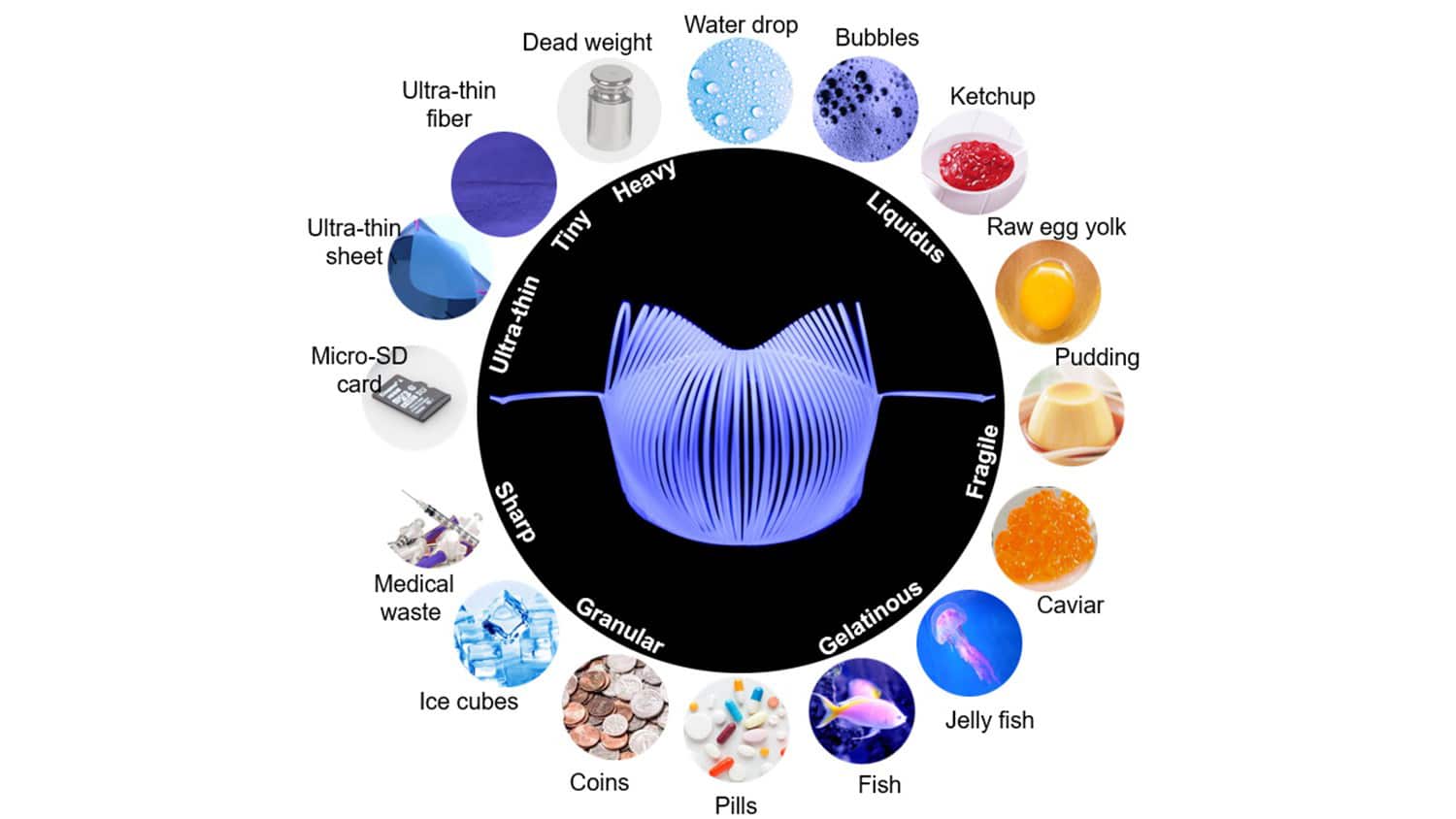
“It is difficult to develop a single, soft gripper that is capable of handling ultrasoft, ultrathin, and heavy objects, due to tradeoffs between strength, precision, and gentleness,” said corresponding author Jie Yin. “Our design achieves an excellent balance of these characteristics.”
The design for the new grippers builds on an earlier generation of flexible, robotic grippers that drew on the art of kirigami — similar to origami but involving both cutting and folding two-dimensional sheets of material to form three-dimensional shapes.
“Our new grippers also use kirigami, but are substantially different, as we learned a great deal from the previous design,” said co-author Yaoye Hong. “We’ve been able to improve the fundamental structure itself, as well as the trajectory of the grippers — meaning the path at which the grippers approach an object when grabbing it.”
“The strength of robotic grippers is generally measured in payload-to-weight ratio,” Yin said. “Our grippers weigh 0.4 grams and can lift up to [14.1 pounds]. That’s a payload-to-weight ratio of about 16,000. That is 2.5 times higher than the previous record for payload-to-weight ratio, which was 6,400. Combined with its characteristics of gentleness and precision, the strength of the grippers suggests a wide variety of applications.”
The researchers also integrated the gripping device with a myoelectric prosthetic hand. “This gripper provided enhanced function for tasks that are difficult to perform using existing prosthetic devices, such as zipping certain types of zippers, picking up a coin, and so on,” said co-author Helen Huang.
“The new gripper can’t replace all of the functions of existing prosthetic hands, but it could be used to supplement those other functions,” Huang added. “And one of the advantages of the kirigami grippers is that you would not need to replace or augment the existing motors used in robotic prosthetics. You could simply make use of the existing motor when utilizing the grippers.”
Proof-of-concept testing demonstrated that the kirigami grippers could be used in conjunction with the myoelectric prosthesis to turn the pages of a book and pluck grapes off a vine.
“We think the gripper design has potential applications in fields ranging from robotic prosthetics and food processing to pharmaceutical and electronics manufacturing,” Yin says. “We are looking forward to working with industry partners to find ways to put the technology to use.”
Yin sat down for an exclusive Tech Briefs interview, edited for length and clarity. Read below.
Tech Briefs: What was the catalyst for your work?
Yin: Last year we published a paper about kirigami. In that work, we demonstrated that this gripper can be used as a grasper, and we also demonstrated that it can lift, maybe, 500 grams. That’s only for manually use — or to use a hand to stretch and do all the demonstrations — now we want to think about doing something more practical, we want to extend the practical applications. For example, how we can integrate with the robotic arms and also even for the prothesis — the prosthetic hand.
The first question is how we can integrate, and the second, actually more fundamental, is how we can improve our designs. So, then we came up with a new design, which was inspired by the cucumber tendril, because it’s bent and the tip is curled. We use an X shape to design the ribbon.
When we stretch that we find the trajectory, which is why we it’s ultra-delicate and also ultra-precise. It enables us to pick up four-micron-meter-thick sheet; human hair is 80 microns.
Our motivation is that we want to make it more practical and also stronger, more precise, and gentler. So, with our gripper we can address all that in one single design. Our design philosophy is one for all, one gripper can do a lot of different things.
Tech Briefs: What was the biggest technical challenge you faced while developing this gripper?
Yin: I think the biggest challenge is — and maybe I just mentioned it a little bit — how can you overcome the trade-off between the compliance, strength, delicacy, things like that. Most software grippers are specialized. For example, you can design one gripper very well with a gentle grasp — called non-destructive grasping or non-invasive grasping.
But you can design other grippers for precise grasping of very tiny, even microscopic objects. And you can also design very strong grippers that can lift a thousand times its weight. To do all this, you need different grippers. So, the challenge here is how can you use just one gripper to do all the jobs — that is pretty challenging.
Tech Briefs: You’re quoted as saying, ‘We think the gripper has potential applications and fields ranging from robotic prosthetics and food processing to pharmaceuticals and electronics. We are looking forward to working with industry partners to find a way to find ways to put this technology to use.’ How is that coming along? Are there any updates you can share?
Yin: We’re now applying for a patent for the grippers, and we’re going to keep improving the designs. For the prosthetic hand, daily tasks are pretty challenging for the current — even the commercial — prosthetic hands, especially the grip. Because this gripper is, we want to say an addition to implement the current grippers. This gripper can be just integrated into existing robotic arms, you only need a stretch. If you integrate our gripper with the existing arm, you don't need the actual power. You don't need an extra sensor. It could work very well.
Tech Briefs: What are your next steps? Any other future plans, research, work on the horizon?
Yin: That’s a long way to go for us because when you think about grippers, everything we’re doing is just picking things up in place, but the gripper should be more powerful. For example, we eventually want to approach a human hand,not only to grasp something but to exert some force. For example, if you open a door, your hand is going to first grasp the handles and then apply torque — a movement — and then push. These are three processes; right now, we can only do the first. That’s definitely a long way to go. That’s one limitation we’re trying to address.
The second one is the way you grasp something — it’s called encapsulating. We want to stabilize the grasping and then to be able to pick and place. Those are two limitations of this work.
Tech Briefs: Is there anything else you’d like to add that we didn’t touch upon?
Yin: The other thing I wanted to mention is its application in agriculture for fruit picking. This could be very good for blueberries or other fragile fruits. Our gripper can deal with that very well; it can be very gentle but also very strong.