

The Mars 2020 mission duplicates most of Curiosity’s entry, descent, and landing (EDL) system and much of its rover design. The mission advances several innovations that include sensors to measure the atmosphere, cameras, and a microphone. Perseverance will have the ability to land in more challenging terrain than Curiosity, making more rugged sites eligible as safe landing candidates.
Entry, Descent, and Landing
The EDL phase begins when the spacecraft reaches the Martian atmosphere about 125 kilometers (about 78 miles) above the surface and ends with the rover safe and sound on the surface of Mars.
Memorable videos depicting this “Seven Minutes of Terror” for the 2012 landing of Curiosity went viral online but used computer-generated animations. No one has ever “seen” the skycrane maneuver — a parachute opening in the Martian atmosphere, the rover being lowered down to the surface of Mars on a tether from its descent stage, the bridle between the two being cut, and the descent stage flying away after rover touchdown. In addition to providing engineering data, a suite of cameras and a microphone will give people on Earth a dramatic sense of the ride down to the surface of the Red Planet.
Like Curiosity, the Mars 2020’s guided entry, descent, and landing system provides the ability to land a very large, heavy rover on the surface of Mars in a more precise landing area than was possible before Curiosity’s landing.
Perseverance carries a microphone with which to record the sounds of descent. This microphone records audio as the rover descends to the surface. Sounds could include friction of the atmosphere, the winds, and the sounds of dust displaced as the rover lands. Engineers are optimizing this microphone for space from easily available, store-bought hardware. It is unlikely it will work beyond landing. If it does survive, the sounds of the Martian winds and sounds of the working rover — such as the wheels turning, the motors that turn its head, or the heat pumps that keep it warm — could be audible.
Range Trigger
It’s hard to land on Mars, and even harder to land a rover close to its prime scientific target. Previous rovers have landed in the general vicinity of areas targeted for study but precious weeks and months can be used up just traveling to a prime target. The Mars 2020 mission team has a strategy to put the rover on the ground closer to its prime target than was ever before possible.

The key to the new precision landing technique is choosing the right moment to pull the “trigger” that releases the spacecraft’s parachute. A capability called Range Trigger on Mars 2020 will time the parachute’s deployment. Earlier missions deployed their parachutes as early as possible after the spacecraft reached a desired velocity.
Instead of deploying as early as possible, Range Trigger deploys the parachute based on the spacecraft’s position relative to the desired landing target. That means the parachute could be deployed early or later, depending on how close it is to its desired target. If the spacecraft were going to overshoot the landing target, the parachute would be deployed earlier. If it were going to fall short of the target, the parachute would be deployed later, after the spacecraft flew a little closer to its target.
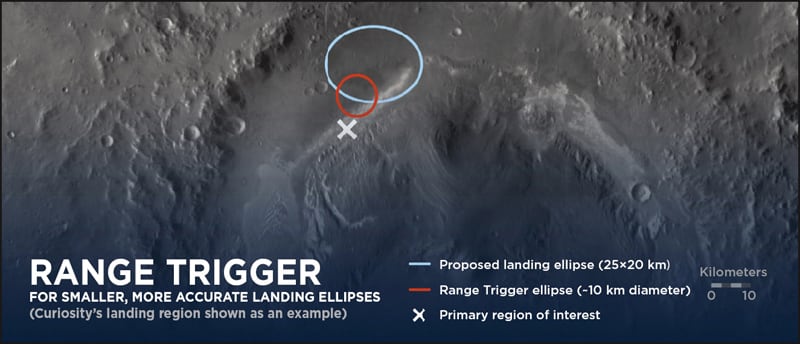
The Range Trigger strategy could deliver Perseverance a few miles closer to the exact spot in the landing area that scientists most want to study. The technology reduces the size of the landing ellipse (an oval-shaped landing area target) by more than 50%, allowing the mission team to land at some sites where a larger ellipse would be too risky because of more hazards on the surface.
It could shave off as much as a year from the rover’s commute to its prime work site. Another potential advantage of Range Trigger is that it would reduce the risk of any future Mars sample return mission because it would help that mission land closer to samples cached on the surface.
Terrain-Relative Navigation
It takes two things to reduce the risks of entry, descent, and landing: accurately knowing where the rover is headed and an ability to divert to a safer place when headed toward tricky terrain. Until now, many potential landing sites with hazardous terrain have been off-limits due to the risks of landing. For past Mars missions, 99% of the potential landing area (the landing ellipse) had to be free of hazardous slopes and rocks to help ensure a safe landing.
Terrain-Relative Navigation helps Perseverance land safely on Mars, especially when the surface below is full of hazards such as steep slopes and large rocks. In prior missions, the spacecraft carrying the rover estimated its location relative to the ground before entering the Martian atmosphere, as well as during entry, based on an initial guess from radiometric data provided through the Deep Space Network. That technique had an estimation error prior to EDL of about 0.6 to 1.2 miles (about 1-2 kilometers), which grows during entry.
Using Terrain-Relative Navigation, Perseverance will estimate its location while descending through the Martian atmosphere on its parachute. That allows the rover to determine position relative to the ground with an accuracy of about 200 feet (60 meters) or less.
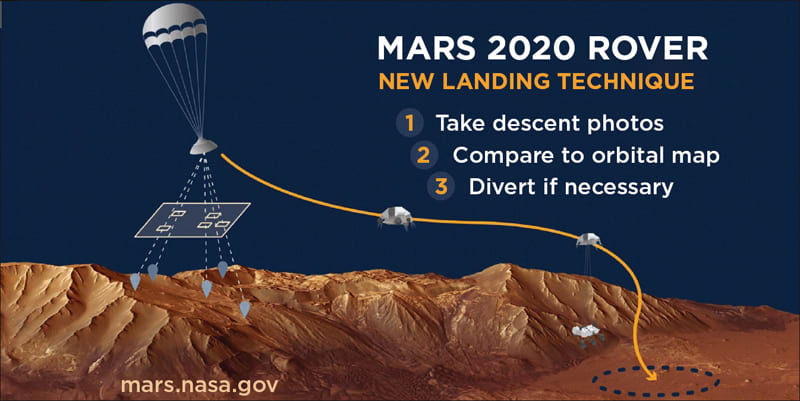
Here’s how it works: First, orbiters create a map of the landing site, including known hazards. The rover then stores the map in its computer. While descending on the parachute, the rover takes pictures of the approaching surface. To determine where it’s headed, the rover quickly compares the landmarks it identifies in the images with its onboard map. If it’s heading toward dangerous ground up to about 985 feet (300 meters) in diameter (about the size of two professional baseball fields side by side), the rover can change direction and divert itself toward safer ground.
MEDLI2
This next-generation sensor suite for EDL collects temperature and pressure measurements on the spacecraft. The original instrument — MSL Entry, Descent, and Landing Instrumentation (MEDLI) — only collected data from the heat shield; MEDLI2 on Mars 2020 collects data from both the heat shield and afterbody.
This data helps engineers validate their models for designing future EDL systems. Atmospheric data from MEDLI2 and MEDA — the rover’s surface weather station — can help scientists and engineers understand atmospheric density and winds. The studies are critical for reducing risks to both robotic and future human missions to Mars.
Cameras
Mars 2020 has a suite of cameras that can help engineers understand what is happening during EDL, one of the riskiest parts of the mission. For the Mars 2020 Perseverance rover, the engineering team is adding several cameras to document EDL in even greater detail. They will shoot full-color video of Mars 2020 throughout its descent to the Martian surface.
Some of what the cameras see on the way down will help mission planners decide on the rover’s first drives. This equipment will help engineers understand what happens when Perseverance lands, how much sand and rock gets blown into the atmosphere by the retro rockets, and how the wheels and legs respond when Perseverance finally puts all its weight down on Mars.
The Mars 2020 camera suite includes parachute up-look cameras, a descent-stage down-look camera to view the rover from above, a rover up-look camera to see the descent stage in operation as it lowers the rover from the skycrane, and a rover down-look camera to view the ground.
Mars 2020 will provide a front-row seat in a Mars landing for the first time in the history of space exploration.
Resources