

A robot being tested at the University of California San Diego takes after an aquatic invertebrate that has a jet-like way moving through the water: The squid.
By generating powerful streams of water, UCSD's squid-like robot can swim untethered. The "squidbot" carries its own power source, and has the room to hold more, including a sensor or camera for underwater exploration.
The researchers detail their work in a recent issue of Bioinspiration and Biomimetics .
“Essentially, we recreated all the key features that squids use for high-speed swimming,” said Michael T. Tolley, one of the paper’s senior authors and a professor in the Department of Mechanical and Aerospace Engineering at UC San Diego.
Squid are fast swimmers and can reach speeds of up to 25 miles per hour. Tolley and his team's robot operates at lower speeds — about a half-mile per hour — but the mechanical motions are similar to those of the real-life underwater cephalopods.
“This is the first untethered robot that can generate jet pulses for rapid locomotion like the squid and can achieve these jet pulses by changing its body shape, which improves swimming efficiency,” said Tolley.
How the Squidbot Works
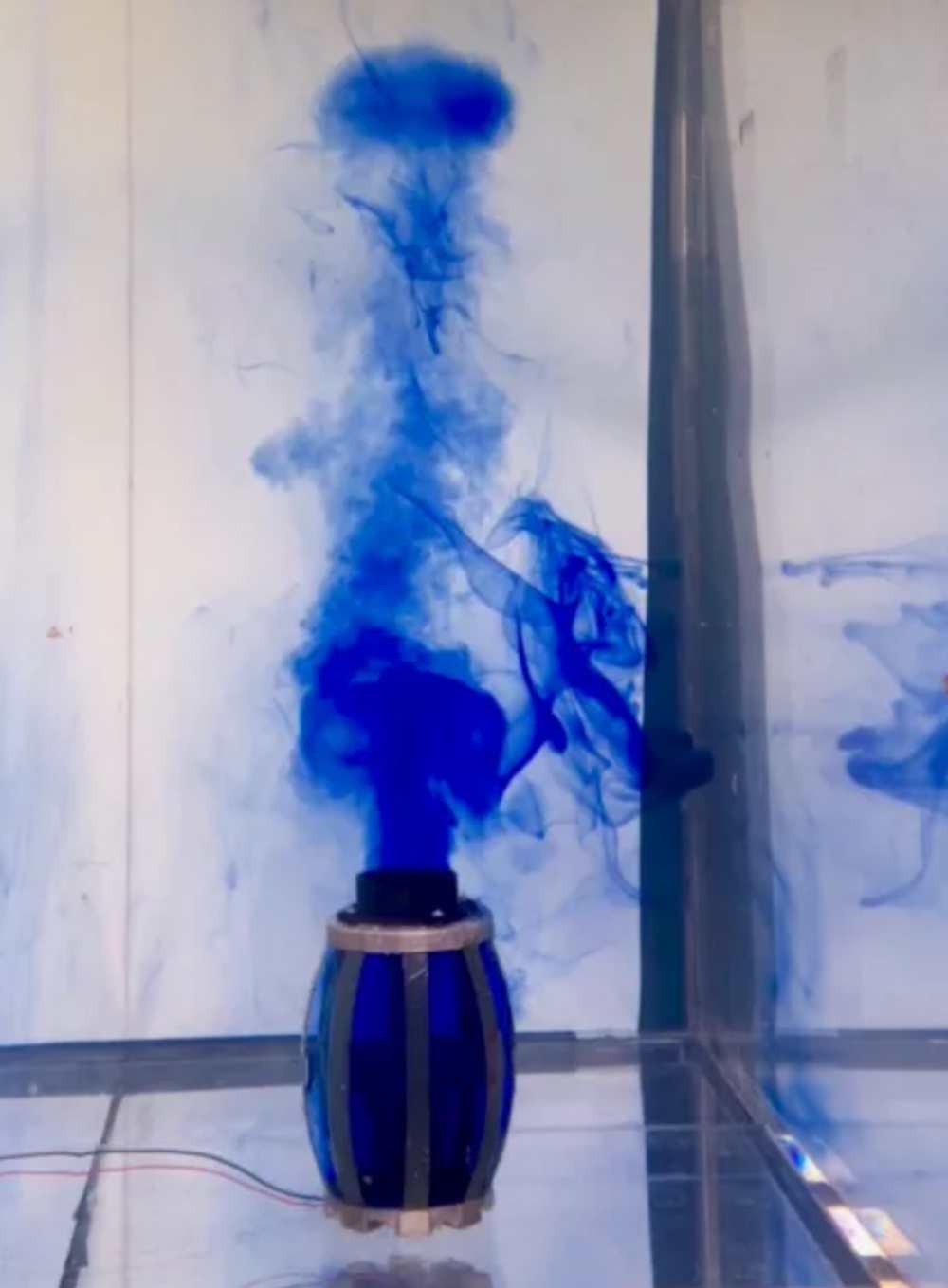
Shaped a bit like a paper lantern, the soft squidbot essentially takes in a volume of water while storing elastic energy in its skin and flexible ribs. The energy is released when the body compresses, generating a jet of water to propel itself.
The ribs, along the body's sides, act like springs and are connected to two circular plates at each end of the robot. One of the ribs is connected to a nozzle that both takes in water, and ejects it when the robot’s body contracts.
A soft acrylic polymer material helps to protect any surrounding fish and coral. The other circular plate is available to carry additional components, like a water-proof camera.
The UCSD engineers first tested the robot in a water testbed in the lab of Professor Geno Pawlak, in the UC San Diego Department of Mechanical and Aerospace Engineering. Next, the team placed the squidbot into the tanks at the UC San Diego Birch Aquarium at the Scripps Institution of Oceanography.
“After we were able to optimize the design of the robot so that it would swim in a tank in the lab, it was especially exciting to see that the robot was able to successfully swim in a large aquarium among coral and fish, demonstrating its feasibility for real-world applications,” said Caleb Christianson, who led the study as part of his Ph.D. work in Tolley’s research group . Christianson is now a senior medical devices engineer at San Diego-based Dexcom.
The researchers from Tolley's lab demonstrated that the robot could steer by adjusting the direction of the system's nozzle. The vehicle reached speeds of about 18 to 32 centimeters per second — not quite squid speed, but faster than most underwater soft robots.
In a short Q&A with Tech Briefs below, Tolley explains how he and his team plan to make the squidbot even better.
Tech Briefs: What kinds of applications do you envision this kind of soft, squid-like robot to be best suited for? Which applications most exciting to you?
Prof. Mike Tolley: Our hope is that we can use these platforms to study the ocean in a less obtrusive, less invasive way. Instead of a submarine with loud propellers, a bio-inspired, soft robot may swim silently, studying sea life without bothering it. A soft robot like this one may be able to swim gently through coral reefs and among fish, or humans, without the risk of harm from the propellers or other rigid parts.
Furthermore, bioinspired platforms like these can help us better understand biology as we are able to validate hypotheses by adjusting parameters in ways that are not possible with natural organisms (as we have done here with the stroke ratio adjustment described in this paper ).
Tech Briefs: Does the squid-like design provide any locomotion challenges? How do you make sure you get the robot to where it needs to go? How precise can it move?
Prof. Mike Tolley: One feature of squid-like locomotion is the rapid short bursts of propulsion followed by periods of gliding. If your goal is to move smoothly (for example, to take a nice video), this is not ideal. If your goal is to escape a predator or chase prey, however, this kind of motion can be beneficial.
In the context of a robotic system, the bursts of propulsion could help get out of tight spots if the robot becomes stuck. In this work, we focused on the propulsion mechanism, and only looked at steering and maneuverability in a limited way, so future work would be needed to achieve squid-like agility.
Tech Briefs: What are you working on now?
Prof. Mike Tolley: We are interested in solving some of the challenges required to make a much more agile squid-bot. We are also interested in making a system we can get into the hands of our collaborators at the Scripps Institution of Oceanography to help study coral reefs and other systems of interest!
What do you think about the "squidbot?" Share your questions and comments below.
Transcript
No transcript is available for this video.