
NASA is interested in designing a spacecraft capable of visiting a near- Earth object (NEO), performing experiments, and then returning safely. Certain periods of this mission would require the spacecraft to remain stationary relative to the NEO, in an environment characterized by very low gravity levels; such situations require an anchoring mechanism that is compact, easy to deploy, and upon mission completion, easy to remove.
Using Chrono::Engine, a simulation pack age capable of utilizing massively parallel Graphic Processing Unit (GPU) hardware, several validation experiments were performed. Modeling of the regolith interaction has been carried out, after which the anchor penetration tests were performed and analyzed. The regolith was modeled by a granular medium composed of very large numbers of convex three-dimensional rigid bodies, subject to microgravity levels and interacting with each other with contact, friction, and cohesional forces.
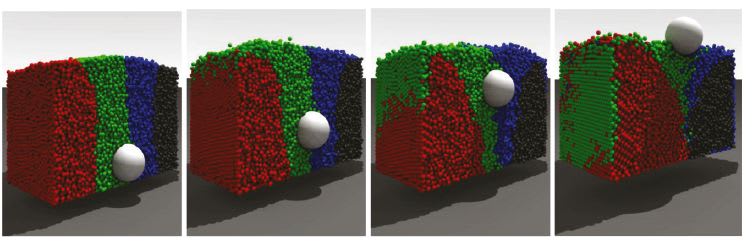
The multibody dynamics simulation approach used for simulating anchors penetrating a soil uses a differential variational inequality (DVI) methodology to solve the contact problem posed as a linear complementarity method (LCP). Implemented within a GPU processing environment, collision detection is greatly accelerated compared to traditional CPU (central processing unit)-based collision detection. Hence, systems of millions of particles interacting with complex dynamic systems can be efficiently analyzed, and design recommendations can be made in a much shorter time. The figure shows an example of this capability where the Brazil Nut problem is simulated: as the container full of granular material is vibrated, the large ball slowly moves upwards.This capability was expanded to account for anchors of different shapes and penetration velocities, interacting with granular soils.
This work was done by Marco B. Quadrelli and Abhinandan Jain of Caltech; and Dan Negrut and Hammad Mazhar of the University of Wisconsin-Madison for NASA’s Jet Propulsion Laboratory.
This software is available for commercial licensing. Please contact Daniel Broderick of the California Institute of Technology at
This Brief includes a Technical Support Package (TSP).
High-Performance Modeling and Simulation of Anchoring in Granular Media for NEO Applications
(reference NPO-48332) is currently available for download from the TSP library.
Don't have an account?
Overview
The document titled "High-Performance Modeling and Simulation of Anchoring in Granular Media for NEO Applications" is a technical report authored by Hammad Mazhar under the mentorship of Marco Quadrelli at NASA's Jet Propulsion Laboratory (JPL). It focuses on the challenges and methodologies associated with anchoring spacecraft to Near Earth Objects (NEOs) during exploratory missions.
The primary objective of the research is to develop a reliable anchoring mechanism that allows a spacecraft to remain stationary relative to a NEO while conducting experiments. This is crucial for ensuring the safety and success of missions that involve landing on or interacting with these celestial bodies. The report emphasizes the need for an anchoring system that is compact, easy to deploy, and can be removed effortlessly after mission completion.
To address the complexities of anchoring in granular media, the document discusses advanced modeling techniques. It highlights the importance of accurately simulating the interactions between granular materials, which can be influenced by factors such as friction and contact dynamics. The report contrasts traditional penalty or regularization methods with a more sophisticated approach that utilizes time-stepping procedures to solve differential variational inequality (DVI) problems. This method allows for a more precise representation of the physical interactions involved in anchoring.
The report also details a parametric study aimed at understanding the settling behavior of granular materials. It identifies key parameters that can reduce interpenetration during simulations, such as decreasing the time step, increasing the number of linear complementarity problem (LCP) iterations, and enhancing the responsiveness of each iteration. These adjustments are critical for capturing short-range interaction forces accurately.
In addition to the technical aspects, the document serves as a resource for further research and technology development in the field of aerospace engineering. It is part of NASA's Commercial Technology Program, which aims to disseminate findings that have broader technological, scientific, or commercial implications.
Overall, this report provides valuable insights into the modeling and simulation of anchoring mechanisms for NEO missions, contributing to the advancement of space exploration technologies and methodologies. It underscores the importance of innovative approaches in overcoming the challenges posed by the unique environments of NEOs.