
On August 6, 2012, the Mars Curiosity rover successfully landed on the floor of Gale Crater on Mars. The Curiosity rover is about the size of a small SUV — 10 feet (3 meters) long, not including the arm, 9 feet (2.7 meters) wide, and 7 feet (2.2 meters) tall.

The Mars Science Laboratory is managed for NASA by the Jet Propulsion Laboratory (JPL), a division of the California Institute of Technology in Pasadena, California. JPL engineered Curiosity to roll over obstacles up to 25 inches (65 cm) high and to travel up to about 660 feet (200 meters) per day on Martian terrain.
Imaging Components of the Rover
Unlike earlier rovers, Curiosity carries equipment to gather samples of rocks and soil, process them, and distribute them to onboard test chambers inside, equipped with analytical instruments. Similar to the earlier Mars Exploration Rovers, Curiosity has six-wheel drive, a rocker-bogie suspension system, a stereo navigation camera on its mast, and lowslung, stereo hazard-avoidance cameras.
To ensure that the rover can see its way successfully across the perilous Martian landscape, NASA engineers outfitted it with sensors that provide successful guidance capabilities. The Curiosity rover’s “eyes” are the cameras and instruments that give the rover information about its environment. The rover has seventeen of these eyes: Four pairs are for hazard avoidance (“Hazcams”); two pairs are for navigation (“Navcams”); four are for scientific photos and exploration; and one is a descent imager.
The CCD (charged couple device) image sensors for the Curiosity’s Navcams and Hazcams were built in Teledyne DALSA’s Bromont, Quebec semiconductor foundry, as were those on the previous Spirit and Opportunity rovers. The hazard avoidance cameras are installed on each corner of the rover, and the 3D stereoscopic navigation cameras are part of the rover’s camera mast. The Hazcams and Navcams work together to provide a complementary and comprehensive view of the terrain. Each camera has an application-specific set of optics.
Hazcams: Four Pairs of Engineering Hazard Avoidance Cameras
Curiosity’s front and rear Hazcams have fisheye lenses to allow the rover to see a wide swath of terrain. With a field of view of about 120 degrees, the rover uses pairs of Hazcam images to map out the shape of the terrain as far as 10 feet (3 m) in front of it, in a “wedge” shape that is over 13 feet (4 m) wide at the farthest distance.
The cameras must have a wide viewing range on either side because, unlike human eyes, the Hazcams cannot move independently since they are mounted directly to the rover body. The Hazcams are also used by ground operators to drive the vehicle and to operate the robotic arm.
Navcams: Two Pairs of Engineering Navigation Cameras
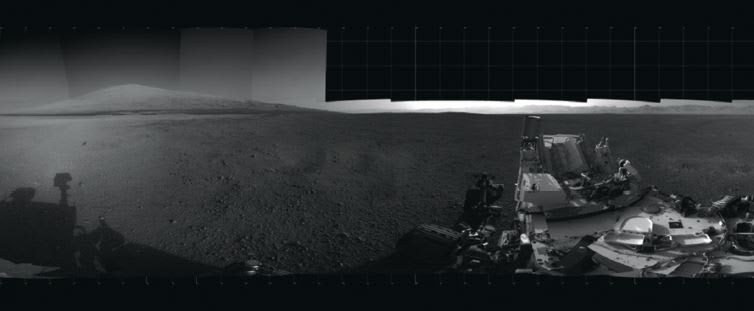
Mounted on the mast of the rover, the black-and-white Navcam cameras also use visible light and gather panoramic, 3D imagery of the ground near the wheels. The navigation camera unit is a stereo pair of cameras, each with a 45-degree field of view. Scientists and engineers will make surface navigation plans based on what the images tell them about nearby rocks or other obstacles. The Navcams also are used for onboard obstacle detection. The Navcams work in cooperation with the Hazcams by providing a complementary view of the terrain.
In addition to the engineering cameras, Curiosity operates science-payload cameras for finding potential scientific targets. These are the Mast Camera, used to identify potential targets for further analysis, the Mars Hand Lens Imager on the arm, and the Remote Microscopic Imager. The latter two imagers provide small-scale observations of textures and features on the science targets.
Custom CCD Image Sensors
In the late 1990s and early 2000s, high performance CCD image sensors were not very common. The Jet Propulsion Laboratory had design, packaging, and test expertise, but was looking for a wafer foundry to build a custom CCD image sensor that would fit the application.
In terms of process, Teledyne DALSA engineers went with a conservative and simple approach, with just enough innovation to get a high-performance CCD without taking risk for reliability. For example, minimum feature size was not pushed to the limit, and material selection for some layers was made to avoid potential reliability problems. CCDs were chosen because they are a robust technology and are qualified for space travel. The CCD is well known for its superior image quality, which is often preferred over speed.
Eventually custom design was matched to custom process, to build 1k by 1k frame-transfer CCDs. After approximately three years of development, a batch of CCDs was made, and they passed all tests for the Spirit and Opportunity rovers.
Custom-manufactured CCD image sensors from Teledyne DALSA proved their reliability in these previous Mars Exploration Rover missions, and the components were chosen once again to function as the imaging technology for the Curiosity rover’s navigational eyes.
Teledyne DALSA engineers reviewed the design with NASA engineers, proposed changes, made masks to build the devices, and fabricated and tested the wafers. Then the wafers were sent to NASA, where the CCD was tested and assembled.
The Mission Continues
The Curiosity rover has captured the minds of many, and even has its own Twitter and Facebook accounts to share information and photos via social media. Signals from the Curiosity’s cameras take about 14 minutes traveling at the speed of light to reach Earth, and then they must be downloaded and processed. Amazingly, these images can be shared very quickly with the public.
Soon after the landing, the Curiosity rover started looking around at its environment and sending images back to Earth. As this mission to Mars continues to search for past or present conditions favorable for life, the imaging components on the rover support the exploration by helping the Curiosity to safely navigate the Red Planet’s surface.
This article was written by Robert Groulx, CCD Product Engineer, and Raymond Frost, Senior Process Integration Scientist, at Teledyne DALSA Semiconductor (Waterloo, Ontario, Canada). For more information, Click Here .