
A lake is usually a picture of serenity, perhaps the last place you’d expect to find a flying-fish robot launching itself 85 feet in the air.
Researchers from Imperial College London (ICL), however, turned tranquility into a testing ground and with just 0.2 grams of calcium carbide, launched their new, bio-inspired aerial vehicle.
The carbon-fiber system can land in the water, collect underwater data, and then passively prepare its angle for an eventual take-off, valuable maneuvers for search-and-rescue and the monitoring of coral reefs, according to lead researcher Dr Mirko Kovac, Director of the Aerial Robotics Laboratory at Imperial.
"Imagine a flood and all the obstacles around it,” Dr. Kovac told Tech Briefs. "We need the type of solution that can quickly provide the rescue teams with information about the environment.”
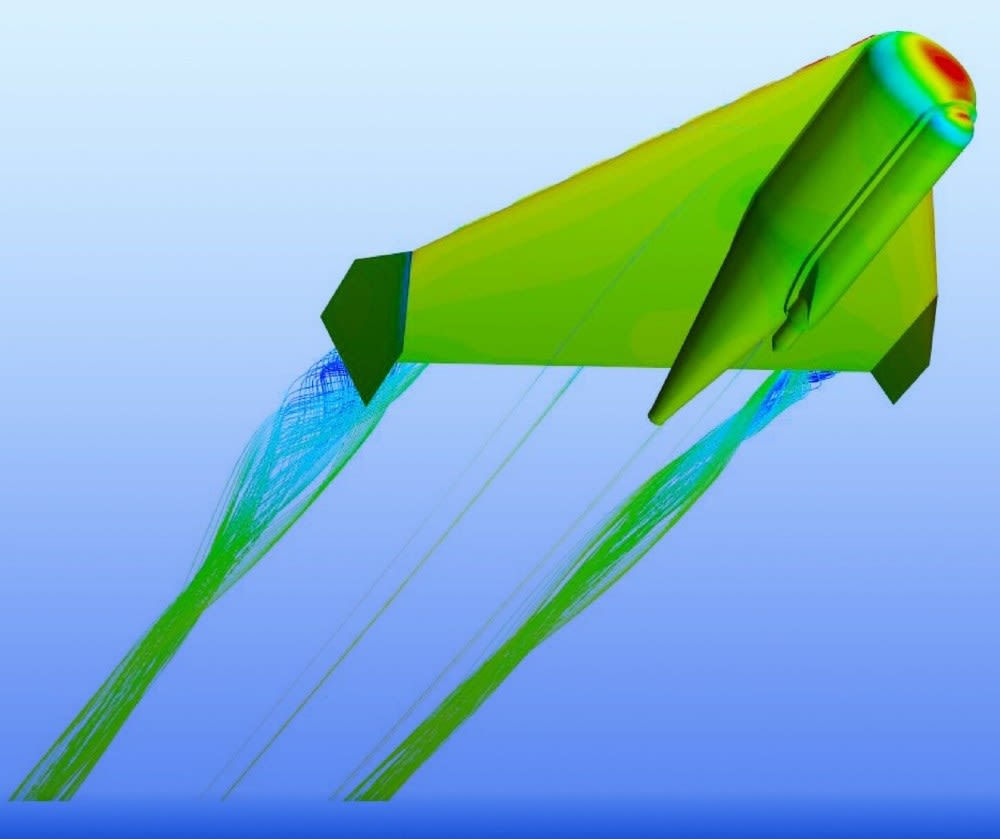
The vehicle’s wing also acts as a kind of fin to guide the vehicle through waves. The vehicle generates a force 25 times its weight — a helpful propulsion when waters get rough.
Aside from a take-off on the lake, the team tested the robot in a lab and in a wave tank, located in the Brahmal Vasudevan Multi-terrain Robotics Arena .
But the technology is more aquatic than aerial, according to Dr. Kovac.
"I wouldn’t think of it as a flying robot that moves underwater. It’s more of an aquatic vehicle, an aquatic sensor, that can overcome obstacles by jumping or leaping out of the water, in the same way as a flying fish," said the lead researcher.
Kovac's team is now working with partners in Switzerland to build new vehicles using advanced materials. The group will also begin field trials and experimental tasks, such as monitoring around coral reefs and offshore energy platforms.
How the Flying-Fish Robot Works
The transition from water to flight is a power-intensive process.
ICL's launch power comes from a chemical reaction: The robot's micro-pump releases a drop of water onto 53 mg of calcium carbide.
The combination forms acetylene gas, which can be ignited to generate up to 7.8 bars of pressure and push water out like a jet.
The vehicle is capable of making multiple launches from the water surface and of transitioning from jetting to a glide.
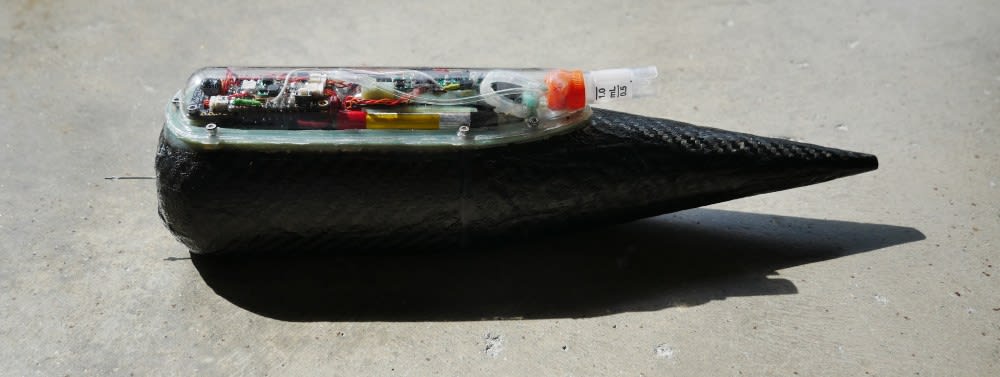
By using water-reactive chemicals, less materials are needed on the drone itself, which weighs 160 grams. Since the chamber fills passively and the water acts a piston, the Imperial researchers create a full combustion cycle with only one moving part: the pump that mixes the water with the fuel.
Additional parts include a carbon-fiber shell, a 3D-printed frame, a gyroscope, accelerometer, battery, chamber interface, microprocessor, pressure sensor, arc ignition system, peristaltic pump, waterproof dome, and fuel container. (See the above video to get an in-depth visual.)
The details were published in September’s Science Robotics .
In an edited interview with Tech Briefs below, Dr. Kovac explains what is possible with such a lightweight, flying-fish-bot.
Tech Briefs: What inspired you to create this kind of robot?
Dr Mirko Kovac: There are two levels of inspiration. From an application point of view, there is a limitation of flying robots currently, which is that they cannot move underwater. They can basically fly, but they cannot dive under or into the water; they cannot fly out of the water typically. Now we have a new family of these aerial aquatic vehicles that we’ve been developing over the last seven years. 26 meters is the jump distance, and that’s just the first test. It's more like a proof of concept.
Tech Briefs: What applications are possible?
Dr Mirko Kovac: This could be used, for example, in the polar regions. Any surface vehicle can typically not access these enclosed water bodies or the ice that is under the water; it's difficult to navigate around the ice as well. This type of robotic approach could overcome those obstacles, to still move successfully in this kind of challenging, cluttered environment.
Other applications include coral reef monitoring, and the detection of plastic pollution, temperature, and pH levels. Another is flooding response. Imagine a flood and all the obstacles around it. We need the type of solution that can quickly provide rescue teams with information about the environment. The robot could measure chemicals released into the water, or identify where a rescue is needed. The vehicle is also helpful for monitoring offshore infrastructure, such as oil [reserves] in the Arctic.
Tech Briefs: What has been the biggest challenge with creating these kinds of vehicles?
Dr Mirko Kovac: The key difficulty is the mobility or the locomotion in cluttered environments, where you have objects in the water. If you want to move around those objects, it’s often impossible to access an area through the water only. Therefore, we looked at ways to build flying vehicles that would be able to move underwater and in the air as well. To make that hybrid approach happen, one of the most difficult parts is the propulsion unit, how to transition from water to air. This is what we present in the paper.
Tech Briefs: What has been the reaction to these robotic capabilities?
Dr Mirko Kovac: I think it’s very exciting. There’s the general wow factor of the video, which is getting a lot of traction. The climate-change community is interested in new robotic tools for validating climate models, or to get more information about the environment. There’s also an industrial response for water sampling and for monitoring around offshore energy systems, like wind farms.
Tech Briefs: Take us through a test of the vehicle.
Dr Mirko Kovac: We tested it in the lab, and outdoors. The lab that we tested it in is a multi-terrain flight arena, [which simulates] an aquatic aerial environment. This lab was funded from a philanthropic gift from Brahmal Vasudevan, who helped us to build this lab from scratch to do exactly the kind of work we present in the paper. So that’s very exciting, because it’s really not just about the robot, but it’s also about the testing facilities for this multi-terrain mobility.
Tech Briefs: What surprised you the most during the test?
Dr Mirko Kovac: The calcium carbide powder required is a fraction of a gram. It’s very, very little. With one gram, the vehicle could do 20 or so such jumps. That’s really surprising, how energy-dense combustion chemicals can be. We were surprised by the thrust and the power that this combusting process has. We are used to small batteries, but they are really nowhere near [the combustion chemicals] in terms of power. Batteries are much lower power than what we [created] in our combustion processes.
Tech Briefs: How is the drone being operated and directed? Is precise steering and direction possible?
Dr Mirko Kovac: We use a Bluetooth controller to initiate the jump, on this stage of the prototype. Our work was more focused on the propulsion unit, but of course it can be integrated with GPS guidance or visual systems.
Tech Briefs: What’s next regarding this research?
Dr Mirko Kovac: There are two frontiers that we’re exploring. First, we're really teaming up with people from the application and environmental-sensing side, and showcasing this or a similar version of this somewhere in the field. We’re looking for partners there.
The other frontier is on the fundamental materials side. We are working with EMPA on the kinds of combustion chemicals we can use in this type of robot.
What do you think? Share your questions and comments below.
Transcript
00:00:00 [Music] [Applause] [Music] [Music] you