
This work is a method to drill into a rock surface regardless of the gravitational field or orientation. The required weight-on-bit (WOB) is supplied by a self-contained anchoring mechanism. The system includes a rotary percussive coring drill, forming a complete sampling instrument usable by robot or human. This method of in situ sample acquisition using microspine anchoring technology enables several NASA mission concepts not currently possible with existing technology, including sampling from consolidated rock on asteroids, providing a bolt network for astronauts visiting a near-Earth asteroid, and sampling from the ceilings or vertical walls of lava tubes and cliff faces on Mars.
The ability of the system to anchor itself to a surface creates potential applications that reach beyond use in low gravity. The use of these anchoring mechanisms as end effectors on climbing robots has the potential of vastly expanding the scope of what is considered accessible terrain. Further, because the drill is supported by its own anchor rather than by a robotic arm, the workspace is not constrained by the reach of such an arm. Yet, if the drill is on a robotic arm, it has the benefit of not reflecting the forces of drilling back to the arm’s joints. Combining the drill with the anchoring feet will create a highly mobile, highly stable, and highly reliable system.
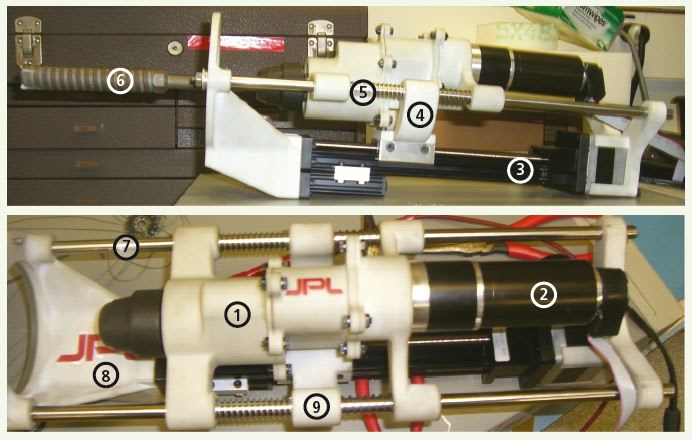
The drilling system’s anchor uses hundreds of microspine toes that independently find holes and ledges on a rock to create an anchor. Once the system is anchored, a linear translation mechanism moves the drill axially into the surface while maintaining the proper WOB. The linear translation mechanism is composed of a ball screw and stepper motor that can translate a carriage with high precision and applied load. The carriage slides along rails using self-aligning linear bearings that correct any axial misalignment caused by bending and torsion. The carriage then compresses a series of springs that simultaneously transmit the load to the drill along the bit axis and act as a suspension that compensates for the vibration caused by percussive drilling.
The drill is a compacted, modified version of an off-the-shelf rotary percussive drill, which uses a custom carbide-tipped coring bit. By using rotary percussive drilling, the drill time is greatly reduced. The percussive action fractures the rock debris, which is removed during rotation. The final result is a 0.75-in. (≈1.9cm) diameter hole and a preserved 0.5- in. (≈1.3cm) diameter rock core.
This work extends microspine technology, making it applicable to astronaut missions to asteroids and a host of robotic sampling concepts. At the time of this reporting, it is the first instrument to be demonstrated using microspine anchors, and is the first selfcontained drill/anchor system to be demonstrated that is capable of drilling in inverted configurations and would be capable of drilling in microgravity.
This work was done by Aaron Parness, Matthew A. Frost, and Jonathan P. King of Caltech for NASA’s Jet Propulsion Laboratory.
In accordance with Public Law 96-517, the contractor has elected to retain title to this invention. Inquiries concerning rights for its commercial use should be addressed to:
Innovative Technology Assets Management NPO-48316
JPL
Mail Stop 202-233
4800 Oak Grove Drive
Pasadena, CA 91109-8099
E-mail:
This Brief includes a Technical Support Package (TSP).
Microgravity Drill and Anchor System
(reference NPO-48316) is currently available for download from the TSP library.
Don't have an account?
Overview
The document is a Technical Support Package from NASA's Jet Propulsion Laboratory (JPL) detailing the Microgravity Drill and Anchor System, specifically focusing on advancements in anchoring and drilling technologies for planetary exploration. It outlines the challenges faced in sampling and mobility on celestial bodies with low or no gravity, such as asteroids and Mars, where traditional methods may not be effective.
A primary objective of the research is to enable efficient and safe movement of rovers and astronauts across the surfaces of these bodies, particularly in areas with consolidated rock or challenging terrain. The document describes a new anchoring system that utilizes compact anchors capable of engaging without the need for preload, which is particularly beneficial for initial anchoring in microgravity environments. This technology is designed to grip onto large boulders and handle the forces generated by coring drills, allowing for effective drilling and sample analysis even in complex geological formations.
The document highlights the use of rotary percussive drills, which are favored for their efficiency in fracturing rock surfaces, making them suitable for applications on Mars and other rocky bodies. A proof of concept demonstrated the ability to perform inverted rock coring, showcasing the system's capability to operate in challenging orientations. The drilling process is described as efficient, with the ability to create boreholes in hard lava rocks within a short timeframe.
The Gripper Project, a key focus of the research, involves the integration of microspine anchors with robotic systems, such as the LEMUR IIB robot, to enhance mobility and drilling capabilities in extreme terrains. The document emphasizes the importance of these advancements for future missions aimed at mineralogical analysis and the study of organic materials on Mars and other small celestial bodies.
Overall, the Technical Support Package presents a comprehensive overview of innovative technologies that address the unique challenges of planetary exploration, highlighting NASA's commitment to advancing in situ exploration systems and improving the capabilities of robotic missions in extreme environments. The research aims to facilitate better access to geological samples, thereby enhancing our understanding of the solar system's composition and history.