
Mobility for small, man-portable reconnaissance robots in the past has been limited with regard to obstacles like curbs, stairs, and vertical walls. A previous innovation overcame these obstacles by introducing rotary microspines — sharp hooks supported by elastic elements on a wheel. In this innovation, the work has been advanced with a new microspine design that eliminates the need for elastomer materials or the inserted hook.
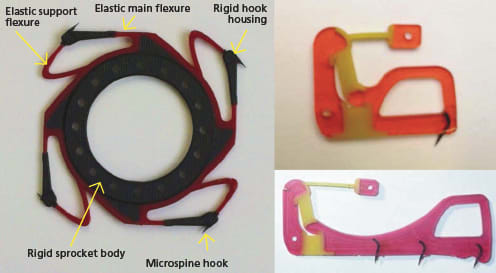
The rotary microspine wheel assemblies consist of a hard, inner rim connected to flexures that connect to the spine housing. These may have a back flexure also attached to the rim, stabilizing and increasing the restoring force into the surface. These back flexures are designed to bend in plane, avoiding any out-of-plane movement. The compression of this back flexure leads to bending actions that fold in on itself, producing a raised section behind the initial spine housing. This mode has been exploited as a means to increase the spine density by placing another spine in the housing at this point. This mode provides a light pinching force into the front spine, improving adhesion. These wheel sections are either separated by dividers or by spacers. The dividers double as disentanglement devices, and as a way to provide a cavity off of the surface for the spines to pass under the wheel. This space allows the microspines to disengage from the surface, while not disturbing the rolling action of the wheel. When spacers are used, similar, thicker, divider-like parts on either side of the wheel assembly provide the open cavity for all of the microspine units. The side-only design reduces weight, but has no disentanglement ability so that the spaces between the wheel units must be in creased, reducing the spine density and further decreasing weight.
This work was done by Aaron Parness of Caltech and Kalind C. Carpenter for NASA’s Jet Propulsion Laboratory.
In accordance with Public Law 96-517, the contractor has elected to retain title to this invention. Inquiries concerning rights for its commercial use should be addressed to:
Innovative Technology Assets Management
JPL
Mail Stop 321-123
4800 Oak Grove Drive
Pasadena, CA 91109-8099
E-mail: This email address is being protected from spambots. You need JavaScript enabled to view it.
Refer to NPO-48999.
This Brief includes a Technical Support Package (TSP).
Rotary Microspine Technology
(reference NPO-48999) is currently available for download from the TSP library.
Don't have an account?
Overview
The document is a Technical Support Package for Rotary Microspine Technology, developed under NASA's Commercial Technology Program. It outlines advancements in microspine technology, which enhances the mobility of robots in various environments, particularly for reconnaissance and observation tasks. The document details the development of several robotic platforms that utilize rotary microspine wheels, enabling them to traverse rough surfaces, scale vertical walls, and navigate obstacles effectively.
Key highlights include the Durable Reconnaissance and Observation Platform (DROP) and the ReconRobotics Scout, both designed for soldier-portable reconnaissance. These robots can transition from horizontal to vertical surfaces and climb rough walls, demonstrating significant improvements in mobility and adaptability in unstructured environments, such as urban disaster areas and natural terrains.
The document also discusses the technical aspects of microspine technology, including the design considerations for climbing forces and the performance of the rotary microspine hooks. It addresses challenges such as entanglement and twist, which can hinder the engagement of hooks with climbing surfaces. Solutions to these issues involve innovative design features, such as exaggerated support flexures and dividers between microspines, which enhance the robots' climbing capabilities.
Additionally, the document presents the development of a novel approach for detecting moving pedestrians using machine learning techniques applied to low-resolution overhead video. This method improves the classification of moving object tracks, showcasing the integration of advanced technology in robotic systems.
The document emphasizes the collaborative efforts in creating common libraries for mobile manipulation planning, mechanism modeling, and control, which have been integrated into various robotic systems, including those used in space applications like NASA's Mars 2020 mission.
Overall, the Technical Support Package serves as a comprehensive resource for understanding the advancements in rotary microspine technology and its applications in robotics, highlighting the potential for these innovations to enhance mobility in challenging environments. It also provides contact information for further inquiries related to research and technology in this field, underscoring NASA's commitment to technology transfer and broader applications of aerospace developments.