
The successful exploitation of hyperspectral imaging sensors depends on the availability of accurate and complete spectral signature libraries. Coupled with the appropriate spectral signature library, images collected with hyperspectral sensors provide the means to survey large areas identifying and characterizing materials, detecting a wide range of camouflaged targets, and detecting disturbed surfaces.

Near Shore Operations
The planning of amphibious operations requires knowledge of the bearing strength and trafficability of the landing area as well as the bathymetry in the vicinity of the landing zone. In addition to these parameters, the identification and location of shallow submerged obstacles and areas such as tidal flats, beaches and wetlands is also required. Hyperspectral remote sensing, analyzed in conjunction with a field collected spectral library, provides the means to characterize a wide range of soil properties, such as soil type, grain sizes, and moisture content, that are key to estimating the bearing capacity of littoral and near-shore surfaces. Hyperspectral imagery is also able to map the locations of obstacles and provides information on near shore bathymetry.
In one study, Bachmann et al. (2009) used a combined dataset that included hyperspectral imagery, field spectral measurements, and the measurement of soil properties to develop a relationship between the field measured spectral signatures and soil bearing strength. They were then able to accurately map the spatial distribution of the observed field spectral signatures and their associated soil bearing strength values.
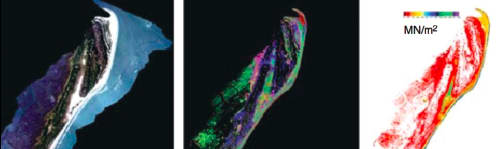
Shallow water bathymetry is also possible using hyperspectral remote sensing techniques. Bachmann et al. (2009) found that in depths of less than 2 meters, water depth could be estimated by the usage of a field spectral database of different bottom types collected at a range of water depths. By matching the change in reflectance observed in the hyperspectral imagery to the sequences of reflectance spectra of a given bottom type, it was possible to produce maps of near shore bathometry. This worked well since bottom type and depth were the dominant factors in determining the observed reflectance and, in the study area, optical properties of the water column were of secondary importance.
Detection of Buried Land Mines and IEDs
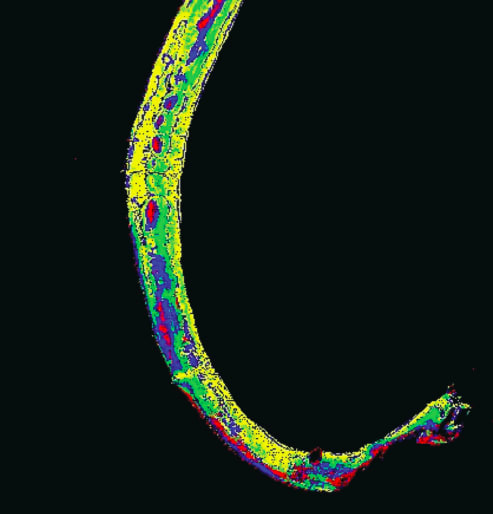
The mineralogic makeup of natural soils in the near surface is highly stratified, thus any surface disturbance is detectable as a difference in the surface mineralogy in contrast to surrounding areas. Having knowledge of the mineralogic depth profile of the soil, the depth of the disturbance can also be inferred. Field spectral measurements are the ideal means to characterize mineralogy in soil profiles and so provide the means to collect a soil profile spectral signature database that is key to interpreting hyperspectral surface imagery in terms of occurrence of soil disturbances and the depth of disturbance.
Camouflage
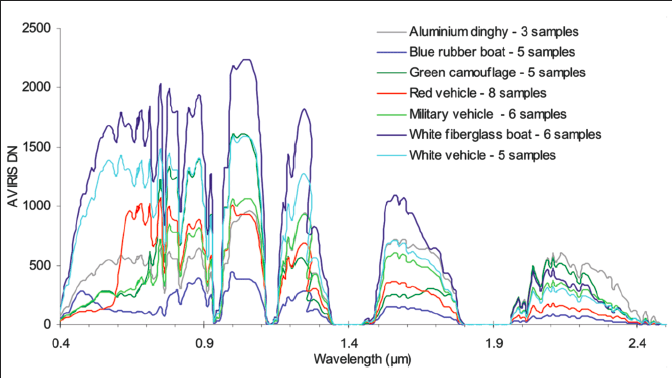
The detection of camouflaged or hidden objects requires a measurement that provides a contrast between the object and background materials. Hyperspectral imagery is well suited to this application since the collected spectrum contains information related to the chemical makeup of materials. In addition, it is often possible to detect the presence of a target spectral signature in sub-pixel quantities when there is sufficient spectral contrast with background materials (Bubner et al. 2001).
As in the previous example, the field collection of spectral signatures of both target and background materials is critical to success. Bubner et al. (2001) found significant discrepancies between laboratory and field measured signatures. These differences tend to be the largest for materials such as soils and vegetation whose spectral signatures are strongly dependent of the structure of the surface and where collection of the material significantly alters that structure.
One of the more widespread uses of camouflage is to mimic the spectral signature of vegetation. While the design of such camouflage is relatively easy when the sensor is the human eye, it becomes progressively more difficult with increasing spectral resolution and wavelength range of the imaging sensor. For the hyperspectral case, it is often possible to detect camouflaged objects that represent as little as 20% of a pixel (Bubner et al. 2001). This isn’t surprising given that the dominant chemical makeup (pigments, water, cellulose, lignin) and complex three-dimensional structure of vegetation is nearly impossible to duplicate in a camouflage material.
Detection of Armored Glass
The previous example demonstrated how field spectral measurements are key to successful information extraction from collected hyperspectral imagery. In this example, the field spectral measurements by themselves are used to provide actionable information in real time.
It is possible to perform identification of the material used in vehicle windows by collecting field spectral measurements. The instrument is configured with a narrow field-of-view fore optic that is selected to provide a field-of-view that is smaller than the vehicle windows that will be measured. The instrument is aimed such that it will view through the vehicle of interest. A target of known reflectance is positioned opposite the instrument such that the target is viewed by the instrument and is illuminated by solar or another stable illumination source.
Prior to arrival of the vehicle, a reference measurement is collected (i.e. without anything interposed between the instrument and the target). Once the vehicle is in position, a second measurement is performed and the transmission spectrum is computed by dividing this measurement by the previously collected reference spectrum. The window material is then identified by comparing the measured transmission spectrum to a library of known window materials.
Design and Detection of Taggants
Hyperspectral taggants are markers that have highly diagnostic spectral signatures outside of the visual spectrum. They have a wide range of military applications in the areas of tracking and identifying personnel or other objects.

Summary
Hyperspectral imagery and spectral signature libraries are two of the key components necessary for the application of hyperspectral remote sensing to a wide range of military applications. The applications presented are representative and these techniques can be applied whenever a relationship exists between the material identities and/or properties of interest and the material’s associated spectral signature. In many of the examples presented, field collection of spectral signatures is essential in order for an accurate comparison with hyperspectral imagery since the collection of materials such as soil and vegetation alters their spectral signature.
This article was written by Dr. Brian Curtiss, Co-Founder and Chief Technology Officer - NIR, ASD, Inc., a PANalytical Company (Boulder, CO) For more information, contact Dr. Curtiss at
References:
J. M. Cathcart (2008) Disturbed soil characterization workshop: postmeeting summary. SPIE Proceedings Vol. 7664: Detection and Sensing of Mines, Explosive Objects, and Obscured Targets XV.
- M. Bachmann, C. R. Nichols, M.J. Montes, R.-R. Li, P.K. Woodward, R.A. Fusina, W. Chen, V. Mishra, W. Kim, J. Monty, K. McIlhany, K Kessler, D. Korwan, D. Miller, E. Bennert, G. Smith, D. Gillis, J Sellars, C. Parrish, A. Weidemann, W. Goode (2009) Airborne Remote Sensing of Trafficability in the Coastal Zone. 2009 NRL Review, pp. 223-228.
- P. Bubner, V. K. Shettigara, S. K. Kempinger (2001) An Investigation of Target Detection Ability Using Spectral Signatures at Hyperspectral Resolution. Defence Science and Technology Organisation (Australia) Electronics and Surveillance Research Laboratory, DSTO-TR-0807, pp. 47.
- Curtiss (2001) Standoff characterization of transparent materials. ASD white paper.
- E. Baum, S. Orloff, S. M. Hsu, and H. Burke, (2003) Separability of VNIR/SWIR Reflectance Signatures of Prepared Soil Samples: Airborne Hyperspectral vs. Field Measurements. in Imaging Spectrometry IX, eds. S.S. Shen and P.E. Lewis, Proc. SPIE 5159, pp. 198–209.