
Surface-acoustic-wave (SAW) piezoelectric motors capable of operating in multiple degrees of freedom (DOFs) simultaneously have been proposed. A particularly useful motor of this type could provide both linear and rotary motions. Another particularly useful motor of this type would feature a spherical joint that could be made to undergo controlled, simultaneous rotations about two orthogonal axes; such a motor could serve as a compact actuator in a joint of a robot arm and could be constructed as an integral part of the arm.
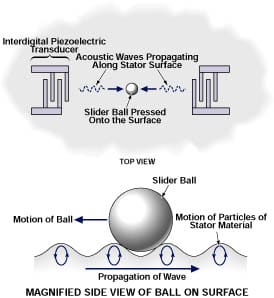
Single-DOF SAW piezoelectric motors have been reported previously [for example, in "High-Torque Ultrasonic Motors" (NPO-19835), NASA Tech Briefs, Vol. 20, No. 10 (October 1996), page 12b]. Though the practical implementation can be fraught with difficulties, the basic principle of operation in the single-DOF case is straightforward: Piezoelectric transducer(s) excite waves that travel along the surface of a stator. A round object (e.g., a rod or a ball) in frictional contact with the stator rides the crests of the waves and is thereby made to move along the surface of the stator (see Figure 1). The resulting rotary or linear motion is coupled to an output shaft. The direction of motion (left or right in the example of Figure 1) is controlled by activating individual piezoelectric transducers. The speed increases with the amplitudes of the waves and thus with the magnitude of the voltage applied to the transducers.
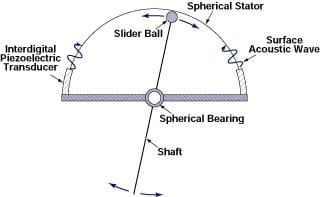
Figure 2 depicts a simple example of a hemispherical motor that would tilt a shaft in two degrees of freedom. The shaft would be anchored in a spherical bearing nominally located at the center of the spherical coordinate system. A slider ball on the inner end of the shaft would make contact with the hemispherical surface, along which surface acoustic waves would be launched by two orthogonally located pairs of piezoelectric transducers (one pair for each degree of freedom). The bearing would be mounted in a plate connected to the hemispherical surface by use of screws, which would be adjusted to obtain the desired force of contact between the slider ball and the hemispherical surface.
This work was done by Yoseph Bar-Cohen of Caltech for NASA's Jet Propulsion Laboratory.
In accordance with Public Law 96-517, the contractor has elected to retain title to this invention. Inquiries concerning rights for its commercial use should be addressed to
Technology Reporting Office
JPL
Mail Stop 122-116
4800 Oak Grove Drive
Pasadena, CA 91109
(818) 354-2240
Refer to NPO-20735
This Brief includes a Technical Support Package (TSP).
Multiple-DOF Surface-Acoustic-Wave Piezoelectric Motors
(reference NPO20735) is currently available for download from the TSP library.
Don't have an account?
Overview
The document presents a novel invention in the field of robotics and motion control: High Precision Multi-Degree-of-Freedom (DoF) Surface Acoustic Wave Motors (USAM), developed by Yoseph Bar-Cohen at the Jet Propulsion Laboratory (JPL). This technology aims to address the limitations of conventional motors used in robotic applications, which often require complex mechanisms and are limited in precision and efficiency.
The primary innovation of the USAM lies in its ability to operate with multiple degrees of freedom simultaneously, combining both linear and rotary movements. This is achieved through the use of surface acoustic wave transducers that generate traveling waves along curved stator surfaces. A slider ball, positioned on these surfaces, is actuated by the waves, allowing for precise control through a connected shaft. The design enables the motor to be compact and integral to the actuated structure, which is particularly beneficial for robotic joints and high-precision applications.
The document outlines the challenges faced by existing motor technologies, such as the need for high pressure (up to 100 MPa) to maintain efficiency and the complexity associated with multiple motors for each degree of freedom. Traditional motors are often backdrivable, complicating precision control and requiring heavy gear systems to achieve necessary torque and speed. The USAM addresses these issues by providing a more efficient and compact solution that reduces the overall mass, volume, and power consumption associated with multi-DoF manipulation mechanisms.
The invention is positioned as a significant advancement over previously reported surface acoustic wave motors, which were limited by their planar configurations and the impracticality of uniformly applying high pressure. The USAM's three-dimensional configuration allows for improved performance and versatility in robotic applications, such as those seen in advanced robotic systems like Robonaut and Serpentine.
In summary, the document highlights the potential of USAM technology to transform robotic actuation by offering a high-precision, efficient, and compact solution for multi-DoF motion control, paving the way for more sophisticated and capable robotic systems in various applications.