
A proposed robotic apparatus for underground exploration would propel itself downward in a percussive manner reminiscent of a jackhammer, pile driver, or hammer-and-chisel combination. Called a "subsurface explorer" (SSX), the apparatus (see figure) would include a hammer that would be moved within a generally cylindrical housing to repeatedly strike a chisel in the form of a rounded nosepiece at its front (lower) end. Each impact of the hammer on the chisel would give rise to an impact of the chisel on the rock and/or soil at the front. The rock (if any) at the front end would be crushed into fine particles. Upon each impact, the apparatus would advance a small distance downward; concomitantly, the soil and/or rock particles would flow upward relative to the housing and would become recompacted behind (above) the apparatus. Thus, the apparatus would bury itself and, unlike in drilling, there would be no need to remove ground material to form a hole.
The apparatus could carry sensors, sensor circuitry, and control circuitry, all loosely sprung inside the housing for protection against shocks from hammer blows. Inertial sensors could measure stroke lengths for purposes of feedback control and estimating speed and depth of penetration. An array of geophones on the surface could measure echoes of the percussions for purposes of locating the apparatus and mapping the subsurface environment.
The vehicle would be driven electrically from a high-voltage, low-current power source above the surface. The power would be delivered via a pair of hair-thickness insulated wires that would be paid out from the rear (upper) end of the vehicle and would thus become buried in the overlying displaced material. According to preliminary design estimates based on a cross section and hammer impacts comparable to those of a manually driven sledge hammer about once every 10 seconds, a time-averaged delivered power of about 50 to 100 W would be needed to effect an advance of about 0.4 mm/s through typical rock. Digital signals for control and for sensor readouts could be superimposed on the relatively steady supply voltage.
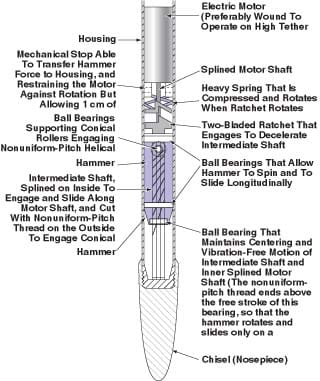
A major innovative aspect of the apparatus would lie in electromechanical means for converting the trickle of supplied power into the periodic bursts of energy (about 500 J per burst) needed to effect the hammer blows. The hammer - essentially a massive hollow cylinder - would be mounted on bearings on an intermediate shaft that would be splined to turn with, and slide along, the shaft of an electric motor. In the first phase of an operating cycle, the motor would be used to spin the hammer around the longitudinal axis to store energy as in a flywheel.
Once the hammer was rotating at maximum speed, the motor would be braked. However, the hammer would continue to rotate. Conical rollers inside the rotating hammer would engage nonuniform helical threads on a shaft, causing the rotation of the hammer to be converted into longitudinal translation. The threads would be configured so that the hammer would undergo approximately constant longitudinal acceleration toward the chisel, and so that at the impact of the hammer upon the chisel, most of the rotational kinetic energy would have been converted to translational kinetic energy.
After impact, the motor would be spun up once again. By virtue of the engagement between the conical rollers and the nonuniform helical threads on the sides opposite those of the engagement for the downward stroke, the hammer would be made to translate back up to the starting position. The cycle described thus far would then be repeated.
This work was done by Brian H. Wilcox of Caltech for NASA's Jet Propulsion Laboratory.
In accordance with Public Law 96-517, the contractor has elected to retain title to this invention. Inquiries concerning rights for its commercial use should be addressed to
Intellectual Property group
JPL
Mail Stop 202-233
4800 Oak Grove Drive
Pasadena, CA 91109
(818) 354-2240
Refer to NPO-20614.
This Brief includes a Technical Support Package (TSP).
Subsurface-Explorer Robot with Spinning-Hammer Drive
(reference NPO20614) is currently available for download from the TSP library.
Don't have an account?
Overview
The document outlines a proposed robotic apparatus known as the Subsurface Explorer (SSX), designed for underground exploration. This innovative device employs a percussive mechanism similar to a jackhammer, allowing it to propel itself downward into the ground. The SSX features a hammer that strikes a chisel at its front end, effectively crushing rock and soil into fine particles with each impact. This method enables the apparatus to advance without the need to remove material, as the displaced soil and rock are recompacted behind it.
The SSX is equipped with various sensors and circuitry housed within a cylindrical casing, designed to withstand the shocks from the hammer blows. Inertial sensors are included to measure stroke lengths, providing feedback control and estimating the speed and depth of penetration. Additionally, an array of geophones on the surface can detect echoes from the percussions, aiding in the localization of the apparatus and mapping the subsurface environment.
Powering the SSX is an electric drive system that draws from a high-voltage, low-current power source located above the surface. This power is delivered through thin insulated wires that are paid out from the rear of the vehicle, becoming buried in the displaced material. Preliminary design estimates suggest that a time-averaged power of approximately 50 to 100 watts would be necessary to achieve a penetration rate of about 0.4 mm/s through typical rock. The system is designed to superimpose digital control signals and sensor readouts onto the steady supply voltage.
A key innovation of the SSX lies in its electromechanical mechanism, which converts a continuous trickle of supplied power into the periodic bursts of energy required for the hammer blows. The hammer itself is a massive hollow cylinder mounted on bearings, which spins around its longitudinal axis to store energy, functioning similarly to a flywheel during the initial phase of its operating cycle.
Overall, the Subsurface Explorer represents a significant advancement in robotic technology for subsurface exploration, combining innovative engineering with practical applications for geological and environmental studies. The work is conducted under the auspices of NASA and the Jet Propulsion Laboratory, emphasizing its potential for future exploration missions.