
The automotive industry is moving beyond the small electric commuter car and is now offering a variety of models to meet an increasing range of needs, from family transport to sports and recreation. These vehicles are typically larger and, as a result, heavier than earlier EV models. These require larger electric motors which, in turn, consume more power. Whether the vehicle is full-electric, plugin hybrid, or mild hybrid, the voltage and current levels involved are considerable. In most cases, the batteries must supply many hundreds of volts to achieve the driving experience necessary to take electric vehicles to the next level of performance. Because of this, closely monitoring the volume of current flowing to the motor is becoming a critically important function for automotive manufacturers.
The Challenge of Accurate Current Measurements in EV Environments
The shift away from internal combustion toward electric drivetrains raises many new challenges for engineers from multiple disciplines. For system engineers, the challenge is balancing the power-to-weight ratio, while electrical and electronic engineers need to focus on power management. Mor-e power means faster and more responsive vehicles — but using too much power, too quickly, leads to rapidly depleted power sources and reduced range. It is therefore critical that every part of the design must be optimized.
The key to power management is accurate measurement — the current sensor is the EV equivalent to the fuel flow sensor in a conventional vehicle. Current measurement can easily be achieved using a shunt, or low-value resistor. The higher the current, the larger the shunt, so measuring currents of the magnitude required for powerful electric motors would demand physically large shunts that are heavy and expensive.
Contactless current sensing provides an attractive alternative to the shunt resistor. Based on the magneto-resistive, or Hall effect, it takes advantage of the electromagnetic fields generated as current passes through a conductor. Because of their smaller size, non-intrusive nature, and inherent galvanic isolation, contactless current sensing is rapidly becoming the preferred current measurement approach for electric vehicle manufacturers.
Contactless Sensor Types for Automotive Applications
The size of the magnetic field surrounding the conductor is proportional to the current flowing, but even with large currents, the field strength is still relatively small. Although Hall sensing elements can be very sensitive, this sensitivity also makes them prone to reading stray or background electromagnetic fields. Fortunately, this distortion can be reduced through shielding or applying compensating techniques.
However, compensating for all forms of stray EMI would demand a deep understanding of all the various sources of interference, which would be challenging. The simplest and arguably more robust approach is to select a contactless current sensor that offers some inherent immunity to stray fields.
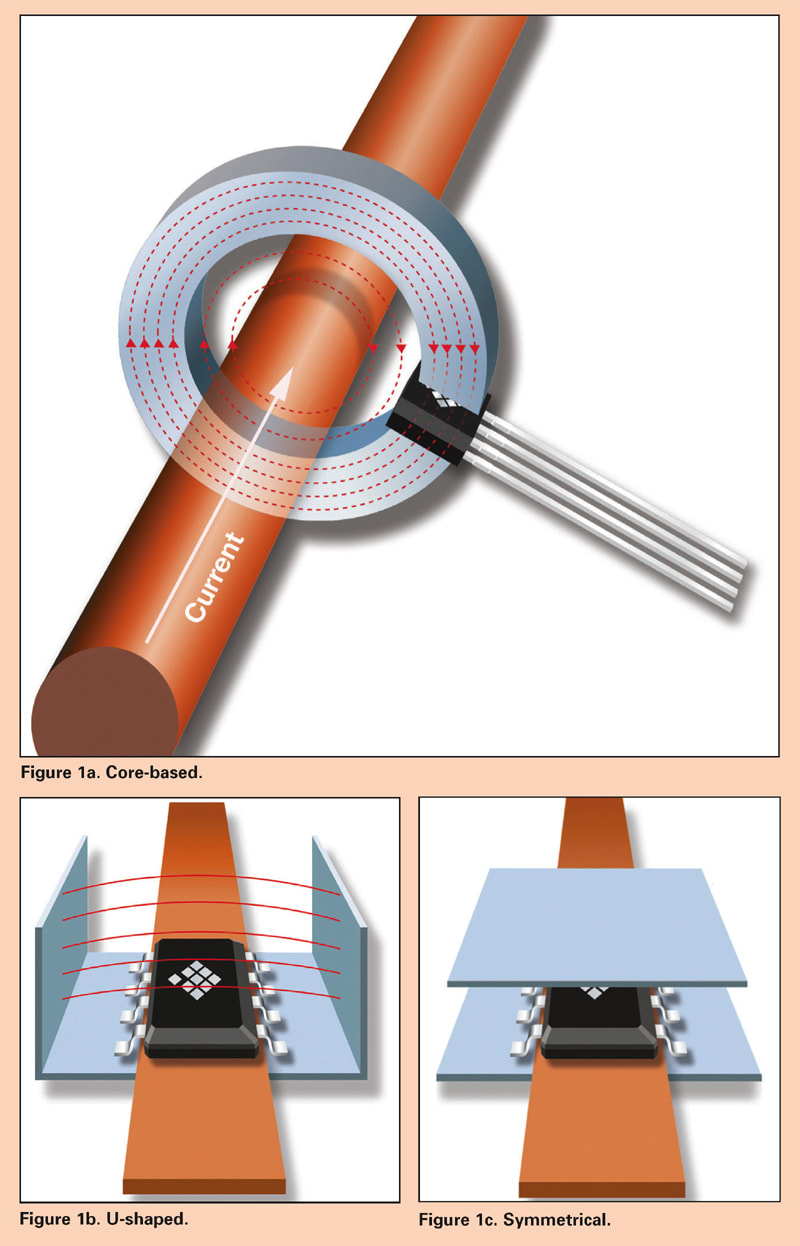
In general, there are three approaches to contactless current sensing, as shown in Figure 1. These include the core-based sensor, the U-shaped sensor, and the symmetrical 'sandwich' shielded sensor. While comparing all three is difficult due to the number of variables presented by unique applications, it is useful to measure performance based on a typical scenario. In this instance, the sensors were evaluated using a 20 mm wide by 2.5 mm thick busbar with a rectangular cross-section, carrying 1000 A.
Core-Based Contactless Current Sensors
In a core-based sensor, a flux concentrator is positioned around the material carrying the current to be measured. The circular shape of the concentrator is interrupted by a small air gap, into which the magnetic field sensor is placed. The core helps focus the flux induced by the current flowing in the busbar to the sensor.
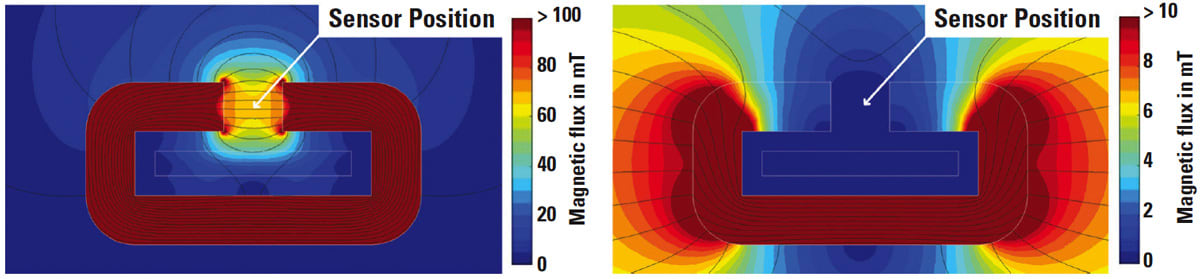
The sensitivity of the sensor to the flux generated by the current flow is dependent on several factors. The first of these is the size of the air gap, as a smaller air gap allows a higher amount of flux to reach the sensor. It follows, therefore, that a smaller sensor would allow for a smaller air gap. As shown in Figure 2, in this experiment, a current of 1000 A results in the sensor registering a flux density of 200 mT. By comparison, if no core were present, the same sensor would register a flux density of just 20 mT. Sensors suitable for this configuration include the HAL 24xy from TDK.
To measure this configuration's immunity to stray fields, a simulation was carried out assuming an external field with a flux density of 5 mT. The results can be seen in Figure 2, showing how the magnetic field is trained by the shape of the core to flow through the sensor. With the external field present, the sensor's ability to accurately detect the field generated by the current flow is reduced by a factor of 40. The conclusion here is that the corebased sensor offers a good level of shielding from other sources of EMI, and with an appropriate level of signal conditioning, its effects can be further mitigated. In this case, it would be reasonable to expect an offset error of just 0.06% full scale.
However, the core-based approach has the disadvantage of being relatively difficult to mount, as the busbar needs to pass through the core, while the sensor must be located in the air gap. Furthermore, to avoid saturation from large current flows, the core also needs to be physically large. In addition to this, the amount of magnetically sensitive material used in the core itself can result in it becoming a source of hysteretic error and interference.
The U-shaped current sensor addresses many of these disadvantages.
The U-Shaped Shielded Current Sensor
As the name suggests, the U-shaped sensor features a larger air gap, but still offers a degree of shielding from stray EMI. The sensor benefits from shielding on three of its sides thanks to the use of a soft magnetic material. The shape of the concentrator makes assembly easier than a core-based configuration, as the sensor itself can be positioned above the busbar, mounted on a small printed circuit board.
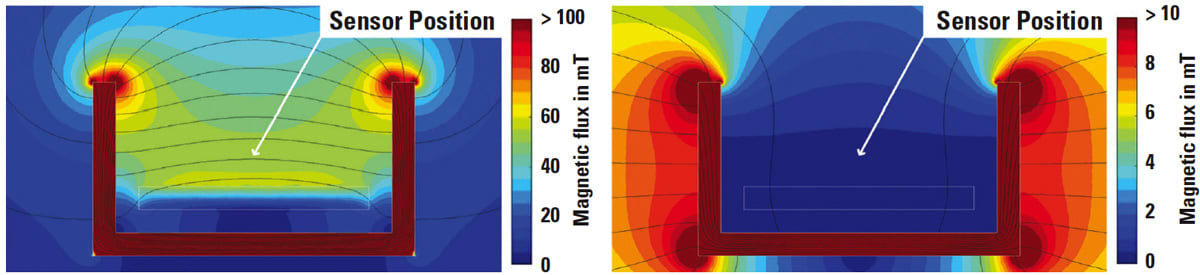
This style of shielded sensor will have lower sensitivity than a core-based approach, which is one of the trade-offs engineers must consider when selecting the most appropriate design for their application. As shown in Figure 3, with 1000 A flowing through the busbar, the sensor detected a magnetic flux density of 50 mT, corresponding to a gain of 2.
The low gain has its benefits, however. It means almost any sensor can be used, such as the HAL 24xy, or the CUR 423x closed-loop sensor based on tunnel-magneto resistance (TMR) from TDK. Also, because there is less concentration of the magnetic field, the shielding material's thickness can be optimized for space, weight, and cost.
As Figure 3 shows, the field is once again directed around the shielding; however, in this configuration, the offset error caused by the stray field is 0.55% full scale. Adjusting the shape of the shielding and the space around the sensor can improve this offset error.
The core-based solution is symmetrical in terms of susceptibility, while the U-shaped configuration is asymmetrical. This means the U-shape is more susceptible to vertically-oriented fields than to horizontal fields. This is another factor to take into account when selecting and locating a contactless current sensor. In its favor, however, this configuration has lower hysteretic error than the core-based sensor, as there is less magnetic material present. Conversely, the size and shape of the sensor are still largely governed by the level of shielding needed.
The symmetrically shielded sensor provides yet another option, bringing benefits in both size and shielding ability.
Current Sensors with Symmetrical Shielding
For applications that require a higher level of shielding at the cost of sensitivity, the symmetrically shielded — sandwich — configuration may be the most appropriate. In this approach, the sensor is located centrally above the busbar, as with the U-shaped approach. However, in this configuration, the sensor is shielded using two pieces of soft magnetic material; one piece sits above the sensor while the second is placed below the busbar. In this way, fields generated by the busbar and any stray EMI are both directed across the sensor's plane of measurement.

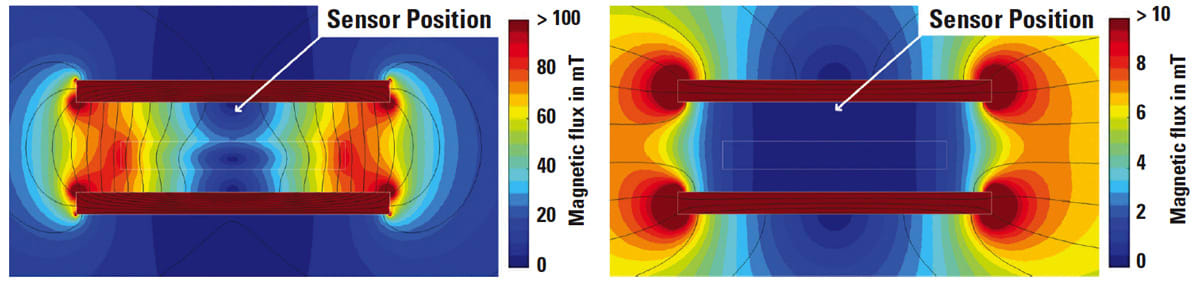
This results in a gain of 0.3, as shown in the simulation results in Figure 4, meaning that for the same current of 1000 A, the sensor measures just 7.8 mT. This indicates attenuation of 70%. Because of this, only sensors with a high sensitivity level, such as TDK’s CUR 423x TMR sensor, can be used.
The major benefit of this configuration is the relatively high levels of shielding it offers when compared to the core-based and U-shaped configurations. Also, while the signal is attenuated and combined with the stray EMI, the result is still an offset error of only 0.51% FS, which is comparable to the U-shaped approach but without the disadvantages that configuration brings.
The biggest advantage of the symmetrical shielding configuration is that the hysteretic error can be fully compensated. This is because the fields in each of the two soft magnetic materials used in the shielding have opposing field orientations. By careful design, the two shields can effectively cancel out any residual magnetic field created by the current flows.
Another major benefit of this approach is its size. The size of the complete sensor implementation is no longer dictated by the size of the flux concentrator or shielding. This means the symmetrically shielded approach can be optimized for size, weight, and cost, whatever the size of the busbar or the current being measured.
Conclusion
While all three of the solutions presented here have their relative benefits, the application will ultimately influence the choice. If high levels of immunity are needed, the core-based design is hard to surpass. If low hysteretic error and small size are driving factors, then the symmetrically shielded sensor configuration is likely to be favored. The results presented in Table 1 provide a good snapshot of the discussion.
The demand for robust, cost-effective, and reliable contactless current sensing in electric vehicles is increasing. As more manufacturers extend their product offerings in this area, consumers can enjoy the benefits that fully or partially electric drivetrains provide.
This article was written by Lukas Klar, application Engineer, TDK Micronas (Freiburg im Breisgau, Germany). For more information, contact Mr. Klar at