
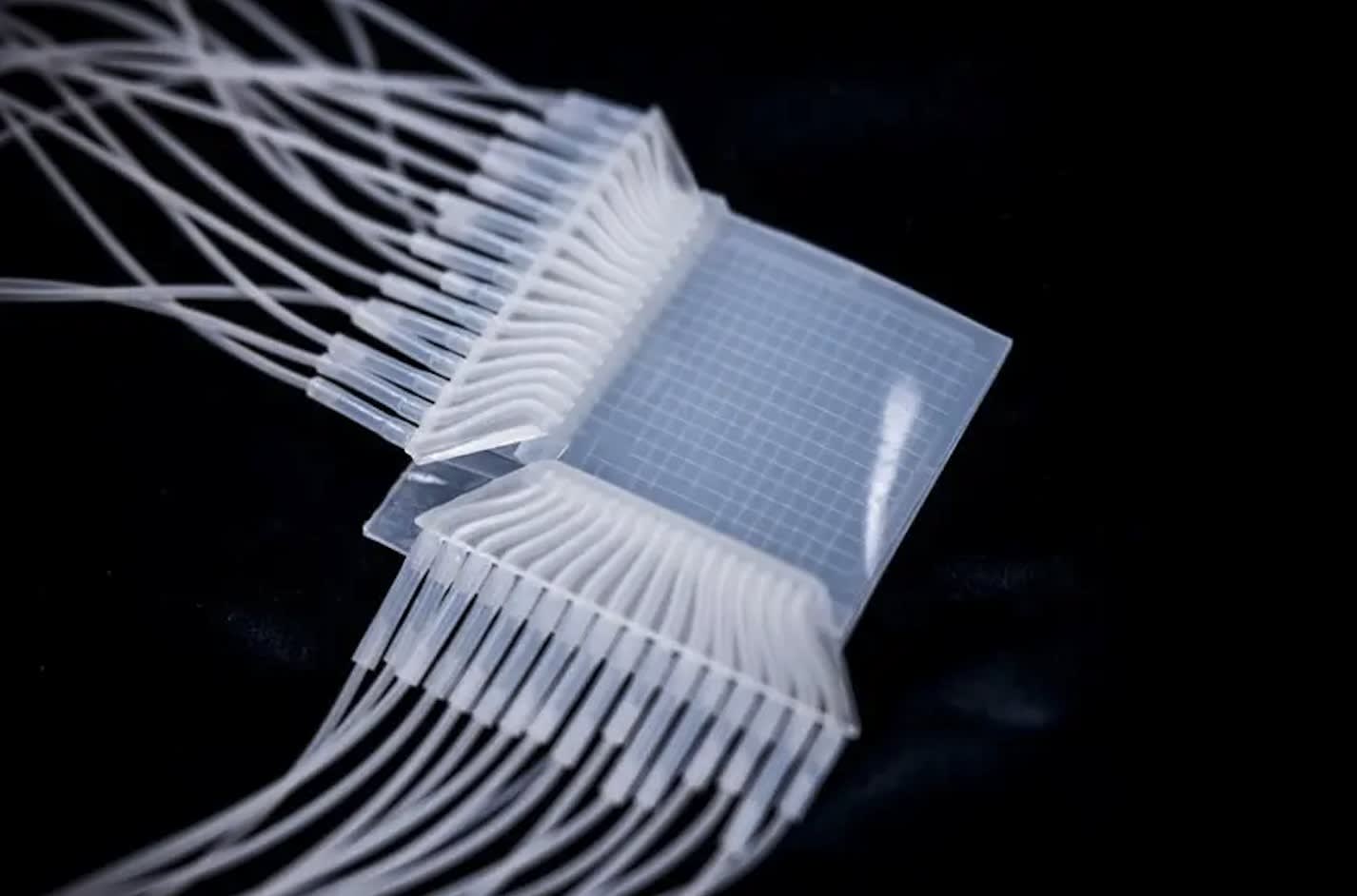
Researchers at Tampere University have developed the world’s first soft touchpad that is able to sense the force, area, and location of contact without electricity. That has traditionally required electronic sensors, but the newly developed touchpad does not need electricity as it uses pneumatic channels embedded in the device for detection.
Made entirely of soft silicone, the device contains 32 channels that adapt to touch, each only a few hundred micrometers wide. In addition to detecting the force, area, and location of touch, the device is precise enough to recognize handwritten letters on its surface and it can even distinguish multiple simultaneous touches.
“Electronic sensors may stop functioning in extreme conditions, such as in a strong magnetic field. Since the touchpad is not electric, a strong magnetic field does not affect it, which makes it ideal for use in devices such as MRI machines," said Doctoral Researcher Vilma Lampinen.
The sensor technology used in the touchpad enables, for example, that if cancer tumors are found during an MRI scan, a pneumatic robot can take a biopsy while the patient is being scanned. The sensor technology guides this robot together with the data produced by the MRI images.
The pneumatic device can also be used in strong radiation or conditions where even a small spark of electricity would cause a serious hazard.
The flexibility of silicone as a material allows the integration of sensors into applications where traditional hard electronics cannot be used. These include soft robots, which are made of soft rubber-like materials and typically move using pneumatic power.
By adding data collected by sensors to such soft, non-electric devices, it will be possible to map the location, force, and area of touch across the entire surface of the device in the future. In addition to soft robots, advanced prosthetic hands would also benefit from adding a sense of touch.
“Soft robotic hands could be used to replace current prosthetic hands on, e.g., production lines. Being soft, they are safer, lighter and potentially cheaper to manufacture. Touch sensors around the hand would also enable a more delicate grip,” said Lampinen.
Wearable devices made of soft materials could also be used in rehabilitation, for example, as movement aids. Softness improves comfort compared to similar hard devices.
Here is an exclusive Tech Briefs interview, edited for length and clarity, with Co-First Author Veikko Sariola, Associate Professor.
Tech Briefs: What was the biggest technical challenge you faced while developing this touchpad?
Sariola: Fabricating micropneumatic channels that do not leak or don’t get clogged was the most challenging part.
Tech Briefs: How did this project come about? What was the catalyst for your work?
Sariola: Originally, we were inspired by recent successes of fluidic actuators in soft robotics. In soft robotics, pneumatic actuators have proven capable of generating large motions and they can be fabricated from a single material (silicone). The actuators are like balloons: when you pump air into them, chambers inside the actuators expand. However, in their simplest form, these actuators are completely open-loop devices, with no sensors or feedback. As soon as you start adding electrical sensors to them, the simplicity is lost: you need to have electrically conductive materials integrated into the actuators, and you need to route two different types of signals; pneumatic and electrical. Thus, if the sensors would also be pneumatic, we could use the same materials and fabrication processes for the actuators and the sensors.
Later, we realized that even without the actuators, these sensors could be well-suited for applications where it would be difficult to use traditional electronics, such as high magnetic fields or in high radiation. One possible use case would be inside magnetic resonance imaging (MRI) machines. For example, in MRI-guided robotic surgeries or biopsies, the pneumatic touch and tactile sensors could be integrated into the robotic tools, to give force-feedback to the operator. Also in nuclear power plants, nuclear waste management and decommissioning, we foresee these touch sensors being used to give nuclear waste-handling robots a more delicate grip. Being entirely pneumatic, they would be immune to even strong radiation.
Tech Briefs: Can you explain in simple terms how it works?
Sariola: Inside the silicone devices, we have 16 micropneumatic channels running column-wise, and 16 row-wise. We measure the flow of air through each of these channels. When the touchpad is compressed, the channels beneath the touch get constricted, reducing the flow through the row and column channel below the touch, blocking them altogether if high enough force is applied. By detecting which of the channels are constricted, we can detect where & how much the touchpad is being pressed.
Tech Briefs: What are your next steps?
Sariola: We are initiating partnerships to test if the devices can be manufactured in high volume. But before scaling up the manufacturing process, our short-term plans include improving the reliability of the microchannel manufacturing and better integration of the measurement pneumatics.
Tech Briefs: Do you have any advice for engineers/researchers aiming to bring their ideas to fruition, broadly speaking?
Sariola: This line of research came about by thinking through analogies. Unexpectedly, the idea first started as a lecture in one of our courses on microfluidics. In the lecture, we teach the analogy between fluid flows and electrical currents, because students are nowadays more familiar with the theory of electricity rather than fluidics. This lecture got us thinking: “What would be the fluidic analogy of an electrical strain sensor?” This simple question eventually led to the current work on the micropneumatic touchpad. The experience also highlights the importance of explaining your ideas and concepts to others: You think about ideas more deeply when you try to explain them.