
A team of Cornell researchers, led by assistant professor Kirstin Petersen, designed a new and simple system of fluid-driven actuators that enable soft robots to achieve more complex motions. The team did so by taking advantage of the very thing that had previously hindered the movement of such robots — viscosity.
The lab had been exploring ways to take a robot’s cognitive capabilities and behaviors and offload them from the “brain” onto the body — via its mechanical reflexes and ability to leverage its environment. By reducing the need for explicit computation, the robot can become simpler, more robust, and less expensive to manufacture.
“Soft robots have a very simple structure but can have much more flexible functionality than their rigid cousins,” Petersen said. “They’re sort of the ultimate embodied intelligent robot. Most soft robots these days are fluid-driven. In the past, people have looked at how we could get extra bang for our buck by embedding functionality into the robot material, like the elastomer. Instead, we asked ourselves how we could do more with less by utilizing how the fluid interacts with that material.”
Traditionally, a soft robot’s fluid-driven actuator functions when evenly pressurized fluid flows through an elastomer bladder or bellow. The main sticking point is if the actuator’s internal flow is viscous, pressure equalizes differently, causing the actuator’s movement to become sluggish and the robot to slow down.
Petersen’s team started from a similar template, except it connected a series of elastomer bellows with slender tubes, run in a pair of parallel columns, all in a closed system. This method allows for antagonistic motions. The tiny tubes induce viscosity, which leads to evenly distributed pressure, bending the actuator into different contortions and motion patterns. That would normally be an issue, but the team turned it into an advantage.
Lead author Yoav Matia developed a full descriptive model that could predict the actuator’s possible motions as well as anticipate how different input pressures, geometries, and tube and bellow configurations achieve them — all with a single fluid input.
“The role of today’s inert structural materials will be very different in our future machines,” Matia said. “It lies in embedding agency and computation into materials — organic to the material, the manufacturing process, and the physical phenomenon governing the system — allowing them to act independently through physical mechanisms and internal architecture. This work represents a novel scalable framework to manifest control of the material by the material, where otherwise inert structural matter acts on their own behalf.”
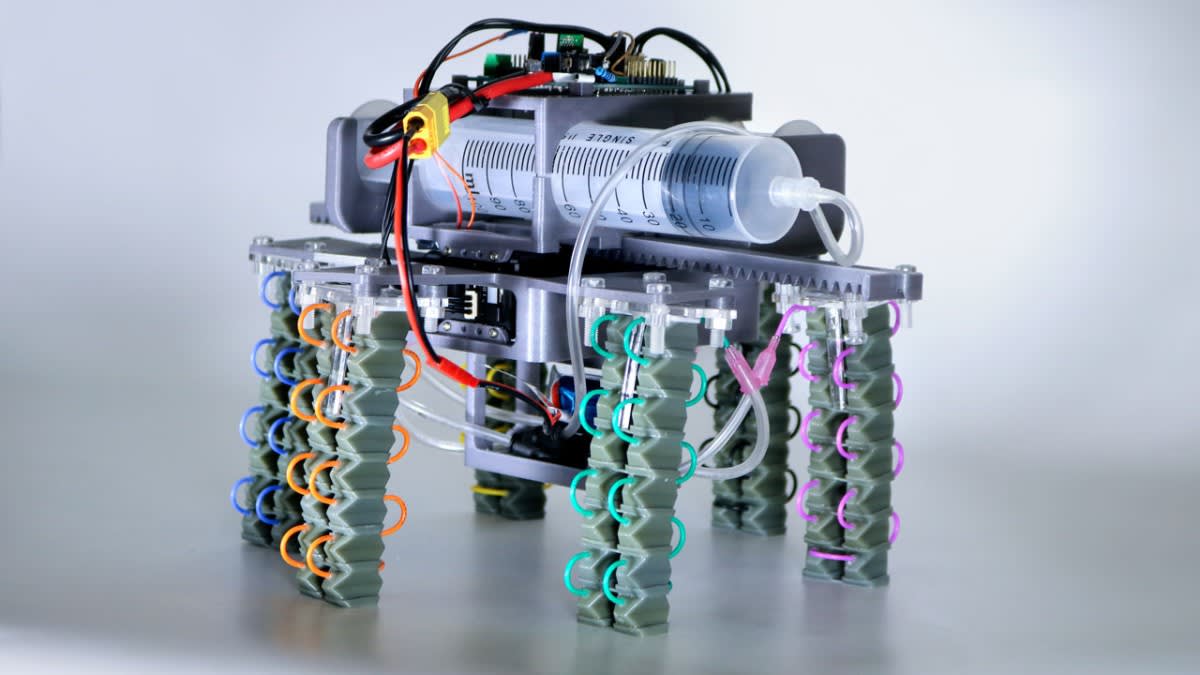
To demonstrate the technology, the team built a six-legged soft robot with two syringe pumps on top, which crouches and walks at 0.05 body lengths per second.
“We detailed the full complement of methods by which you can design these actuators for future applications,” Petersen said. “For example, when the actuators are used as legs, we show that just by crossing over one set of tubes, you can go from an ostrich-like gait, that has a really wide stance, to an elephant-like trot.”
“This is basically a whole new subfield of soft robotics,” she added. “Exploring that space will be super interesting.”
Here is a Tech Briefs interview with Petersen, edited for clarity and length.
Tech Briefs: What inspired the use of viscosity?
Petersen: Software robots are this new kind of robot that are really advantageous for particular applications where infinite degrees of freedom come in handy — the ability to move in infinite manners, and the ability to move safely around objects, and the ability to be compliant in terms of external perturbations and things like that.
Most soft robots are fluid-driven. In the past people have said, “I want to be able to have these infinite degrees of freedom, but it’s really hard to control them.” I had really advanced controllers, because if I want to push the robot somewhere I need a different type of controller. So, the big focus in recent years has been, “How do we simplify the control complexity?” Typically, people look at the material for that — how can we put extra control into the polymers so that the actual drivers don’t become that complicated?
We said, “OK, well we’ve been looking at the material, let’s try to look at the fluids instead. And, what if instead of trying to avoid viscosity — which people normally do — what if we explored it?”
Tech Briefs: How long did your six-legged robot take to build and what were the biggest technical challenges you faced?
Petersen: Once we understood how to build our actuators, putting together the robot was like a couple of weeks; that was very easy. Really, what took the longest was just to get it stable because we’re using soft actuators.
What was hardest was the actuators themselves because we want to see whether we could create them using very low-end materials. And in the end, we sort of went away from that and just said let’s just print them in a high-end polymer so that we have these low bellows and they’ll work.
But we are looking, in the future, to actually printing them in the type of low-end, standard filament printing machines that people have at home so that you could just make your own actuator.
Tech Briefs: Walking and crouching are the two current permutations of the robot. What else do you aim to make it do?
Petersen: I’m really excited about this. The notion is that now with a very single driver — just that one syringe pump — we can create any number of gates. So beyond having a walking robot, where we can change the stamps or the walking type depending on the surface — imagine a swimming robot that can take breast strokes, or it can go backwards if it reverses its gate cycle. You can imagine grippers; for example, trying to create some continuous motion like screwing a nut around a screw or anywhere where we want advanced motions where we can control both the position and the position in time.
Tech Briefs: What are your plans for future exploration? Any next steps planned?
Petersen: Right now, we can only produce motions sort of continuously, so dynamically it will move, but once it goes back to stationary, it’s always in some version of extended or retracted. We can’t place the tip of the robot anywhere we want to once it becomes stationary. So, I’m excited to couple this with traditional technologies, like valves and such, to still have very similar controllers but about one added level of complexity, so that we can also get stationary positions anywhere in the workspace of the actuator.
Tech Briefs: Do you have any advice for engineers aiming to bring their ideas to fruition or market?
Petersen: Patience. It’s surprising how long it takes to do a good demo and verify that it works well. Also, of course, dare to dream!