
Systems that measure the angles of arrival of ultra-wideband (UWB) radio signals and perform triangulation by use of those angles in order to locate the sources of those signals are undergoing development. These systems were originally intended for use in tracking UWB-transmitter-equipped astronauts and mobile robots on the surfaces of remote planets during early stages of exploration, before satellite-based navigation systems become operational. On Earth, these systems could be adapted to such uses as tracking UWB-transmitter-equipped firefighters inside buildings or in outdoor wildfire areas obscured by smoke.
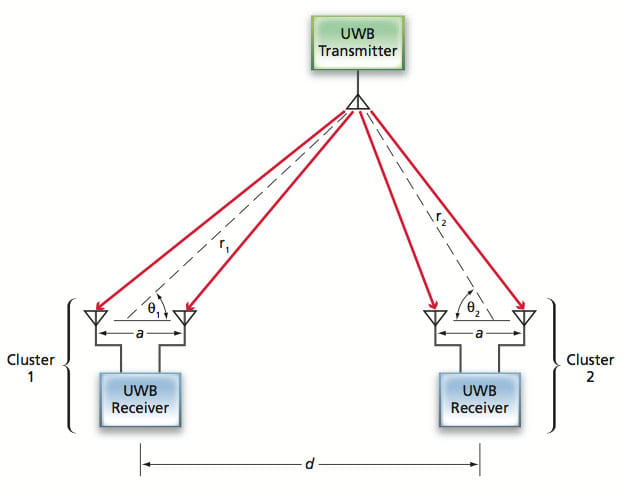
The figure schematically depicts a simple system of this type engaged in tracking a single UWB transmitter on a plane. The system includes two UWB-receiver assemblies, denoted clusters, separated by a known length d. Within each cluster is a UWB receiver connected to two antennas that are separated by a length a that is much shorter than the aforementioned length d. The signals received by the two antennas in each cluster are subjected to a process of cross-correlation plus peak detection to measure differences between their times of arrival. It is assumed that the distances (r1 and r2) between the clusters and the transmitter are much greater than a, as would usually be the case in most practical applications. Then the angles of arrival of the signals at the clusters are given by θ1≈arccos (cτ1/a) and θ2≈arccos (cτ2/a); where θ1 and θ2 are as shown in the figure; c is the speed of light; τ1 is the difference between the times of arrival of a pulse at the antennas in cluster 1; and τ2 is the difference between the times of arrival of a pulse at the antennas in cluster 2. Then using θ1 and θ2, the two-dimensional location of the transmitter, relative to the known locations of the clusters, is calculated straightforwardly by use of the triangulation equations.
The processing of signals to determine the differences between their times of arrival, and the subsequent processing to determine the angles of arrival and the position of the transmitter, is done in a computer external to the clusters. For this purpose, the received waveforms are digitized in the receivers, and the waveform data are sent to the computer via a hub. Even though no attempt is made to synchronize operation of the two receivers, the data from the receivers are quasi-synchronized by means of interface software that effects parallel socket communication with data segmentation, summarized as follows: Waveform data are collected from each receiver in segments, whenever they become available and the computer is ready to collect them. The segments from each receiver are labeled as having come from that receiver and, in the collection process, are interleaved with those from the other receiver in chronological order of collection. Within the computer, the segments from each receiver are stored in a separate buffer. Thus, the contents of the buffers are representations of the same UWB pulse waveform arriving at the two receivers at approximately the same time. When the buffers for both receivers contain complete representations of a UWB pulse waveform, the data from that buffer are copied into an array for use in the calculations described above.
This work was done by G. Dickey Arndt, Phong H. Ngo, Chau T. Phan, and Julia Gross of Johnson Space Center; Jianjun Ni NRC fellow; and John Dusl of Jacobs Sverdrup. For more information, download the Technical Support Package (free white paper) at www.techbriefs.com/tsp under the Electronics/Computers category.
This invention is owned by NASA, and a patent application has been filed. Inquiries concerning nonexclusive or exclusive license for its commercial development should be addressed to the Patent Counsel, Johnson Space Center, (281) 483-1003. Refer to MSC-24184-1.