

This episode of Here's an Idea is sponsored by FUTEK Advanced Sensor Technology .
The Mars-bound Perseverance rover is as sophisticated as it gets. The robotic vehicle features six science instruments, six cameras, six aluminum wheels, and even a helicopter.
But can it jump?
Hendrik Kolvenbach, PhD researcher at the ETH Zurich Robotics Systems Lab , sees the best way to get around on the Moon as less of a step and more of a giant leap. Listen to our episode of Here's an Idea to learn how Kolvenbach and his team are creating a technology that's part space robot and part African springbok.
Subscribe or listen via your preferred podcast provider here.
The "SpaceBok" can hop three feet in the air, continuously. The pogo-like hop is an efficient way to someday get around the low-gravity surfaces of the Moon, according to the robot inventor.
“We have footage of astronauts who had been on the Moon and who would use a jump or a skipping gait, and they find it as the best way to travel," Kolvenbach told us in our latest episode of Here's an Idea.
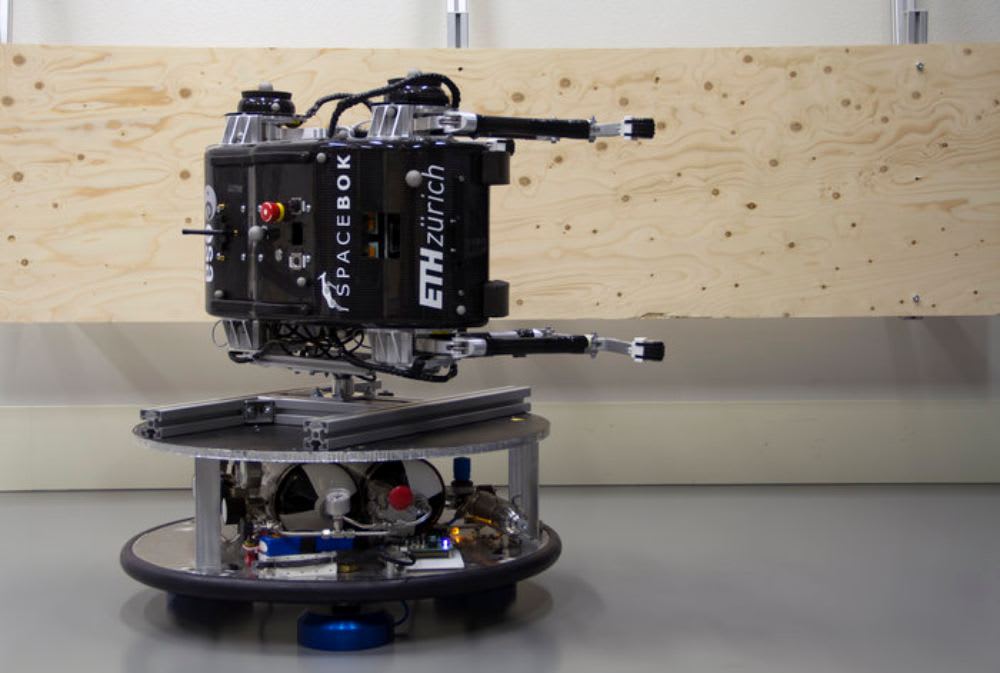
SpaceBok measures about 2.5 feet long by 1.5 feet wide — the size of a small dog, says Kolvenbach.
The researchers pre-program the robot's gait patterns, footholds, and leg trajectories.
Each of the robot's four legs is actuated by two motors each. To make the robot as light as possible, SpaceBok is made from carbon fiber and aluminum.
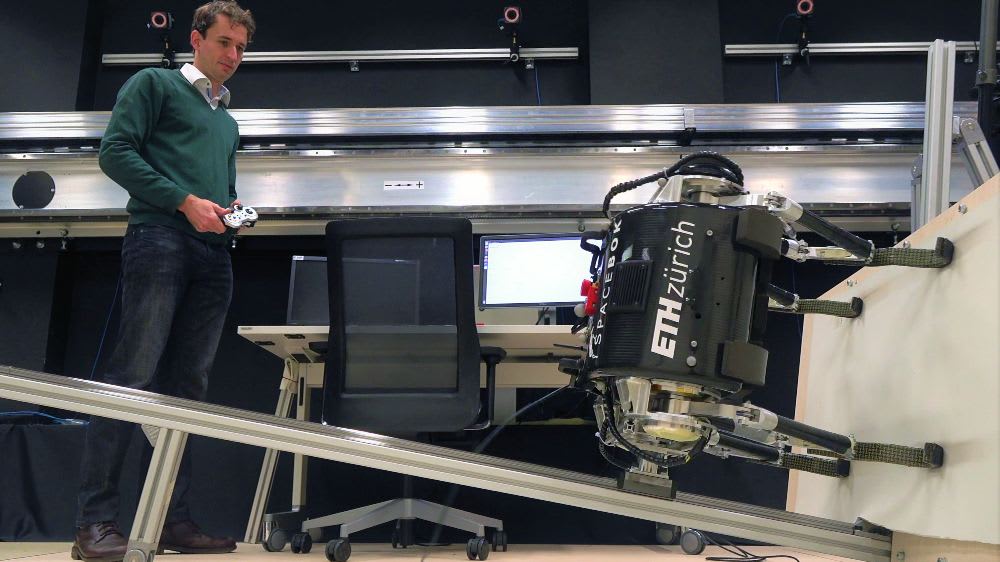
So, how do you know if SpaceBok is space-ready? Listen to our episode to learn how Kolvenbach and his team turned a 500-square-foot ESA testbed into a simulated lunar environment — and got the robot to jump from wall to wall!
Episode Highlights
- (2:34) Why does a space robot need to jump?
- (4:30) Can SpaceBok do tricks?
- (5:35) How do you see SpaceBok being used on lunar missions? (“We are at the stage where we want to go into more challenging environments: caves, craters, highlands, areas in which we would find water or other volatiles, or information about the geological history of a certain place.”)
- (7:00) How did the idea come about?
- (10:54) How do you simulate the lunar environment?
- (13:25) What were the most difficult aspects of the design? (“Our biggest design challenges was the traversal of soft soil.”)
- (15:05 ) What is the status of the project? (“We want to use the legs of the robot to control the attitude, basically like a cat”)
- (19:15) What other robots are you working on? (“We deployed a legged robot in the sewers.”)
- (20:34) Are there ways to use SpaceBok on Earth? “Yes, in industrial inspection tasks, where you want to have a robot that is capable of walking in a man-made environment, like stairs or structures that are very difficult to overcome with wheels.”)
Resources:
Go to Spacebok.ch and ETH Zurich's Robotic Systems Lab to learn more.
See SpaceBok leap!
Testing the Jump

Subscribe to the Here's an Idea newsletter.
Transcript
00:00:02 [Music] [Music] [Music] you