
Creo Direct v17 modeling design software
PTC Corp.
Needham, MA
781-370-5000
www.ptc.com
There are several robotic arms on the International Space Station (ISS), but the two that NASA Johnson Space Center (JSC) robotics analysts deal with the most are the Space Station Remote Manipulator (SSRMS), known as the Canada Arm 2, and the Special Purpose Dexterous Manipulator (SPDM), appropriately named Dextre. Both are operated by the United States and Canada.
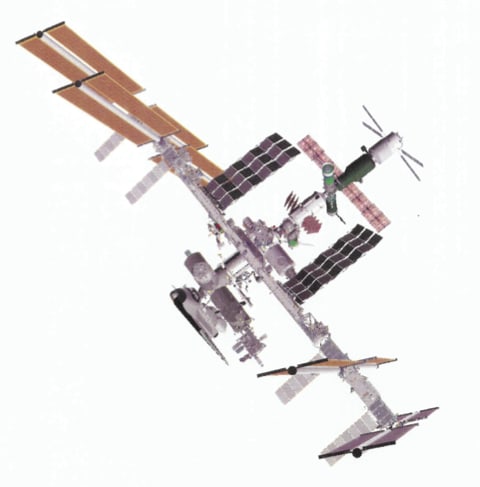 Dextre is primarily designed to swap out old or malfunctioning parts that are stored on various ISS pallets. The Canada Arm 2 has been used primarily to move and install the major modules of the space station. It also supports extravehicular activities (EVAs), or spacewalks, and the movement of astronauts, tools, equipment, and spare parts around the ISS. The Canada Arm 2 can even capture a free-flying vehicle, including Japan’s H2 Transfer Vehicle (HTV), and dock it to the base. Both robotic arms can be controlled from the ground or from a crew on orbit.
Dextre is primarily designed to swap out old or malfunctioning parts that are stored on various ISS pallets. The Canada Arm 2 has been used primarily to move and install the major modules of the space station. It also supports extravehicular activities (EVAs), or spacewalks, and the movement of astronauts, tools, equipment, and spare parts around the ISS. The Canada Arm 2 can even capture a free-flying vehicle, including Japan’s H2 Transfer Vehicle (HTV), and dock it to the base. Both robotic arms can be controlled from the ground or from a crew on orbit.
To plan and simulate the robotic arm movement on the ISS, the NASA International Space Station Robotic Arm Planning Group, headquartered at JSC in Houston, TX, used Creo Direct v17 direct modeling design software from PTC Corp.
As part of the Mission Operations Directorate (MOD) at JSC, robotics analyst John Rollfe and his team of engineers perform various analyses for operations on the ISS. They develop and maintain a 3D virtual environment called the Robotics Planning System (RPS), which models the space station for mission planning. Much of the analysis work is done in this environment, including kinematic assessments of trajectories, clearances, time-line estimations, and safety reviews. Robotics Mission Planners in the directorate use RPS to develop both ground and crew operating procedures.
During flight operations, the mission control team also uses the RPS to monitor real-time flight operations. RPS observes the telemetry downlinks from the ISS and matches the 3D environment to the actual vehicle on orbit. In addition to tracking the movement of the space station’s robotic arms, the planning system also follows the movement of solar arrays, radiators, antennas, and other devices. This allows the flight control team to maintain situational awareness and monitor clearances and procedures in real time, as well as provide virtual views.
To develop the 3D models used in the RPS tool, Rollfe’s team employed the Creo tool. First, the analysts engineered CAD models provided by the various vendors of ISS components, then they created the three-dimensional figures from those models.
Most of the time, said Rollfe, the engineering CAD models were received in STEP format, the format usually used to exchange 3D models between different CAD systems. Then they removed unneeded internal details, added colorations and markings to create a realistic representation of the hardware, and then exported them as Virtual Reality Modeling Language (VRML) files to the RPS tool. “Unlike 3D models for games, we must also maintain a high degree of dimensional accuracy in our models due to their use in procedure development and clearance monitoring — a necessity when doing operations such as capturing Japan’s HTV and docking it to the ISS,” said Rollfe.
Creo allows his team to project items onto workplanes and use the projections to extrude or revolve new parts. Its spline function helps them create complex curves, said Rollfe, which are needed to model wires and tubes. Another essential feature, according to Rollfe, is the ability to work with virtual coordinate frames. “Our whole world revolves around the use of coordinate systems and the frames that represent them,” he said. “In fact, our RPS environment is based on the relationship and movement of frames relative to each other; this is how the software knows where to place specific models in the work scene.” Rollfe needed a tool to measure the position and orientation of one frame with respect to another regardless of its world scene location, so PTC provided the necessary capability as an add-on.
The JSC team, which is still using the Creo tools, began employing the CAD software in April of 2009.
For Free Info Click Here