
On medium- to long- duration human spaceflight missions, latency in communications from Earth could reduce efficiency or hinder local operations, control, and monitoring of the various mission vehicles and other elements. Regardless of the degree of autonomy of any one particular element, a means of monitoring and controlling the elements in real time based on mission needs would increase efficiency and response times for their operation. Since human crews would be present locally, a local means for monitoring and controlling all the various mission elements is needed, particularly for robotic elements where response to interesting scientific features in the environment might need near- instantaneous manipulation and control.
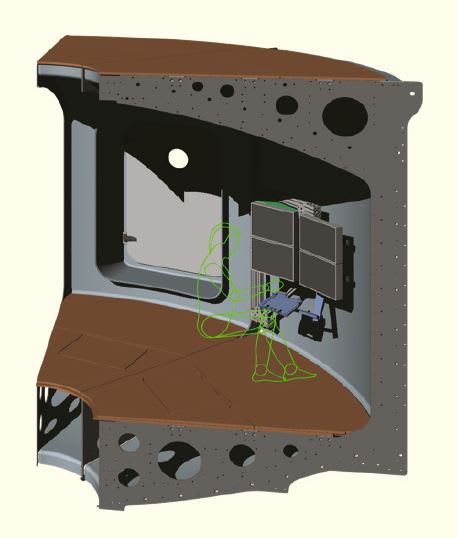
The Telerobotics Workstation (TRWS) is a multi- display computer workstation mounted in a dedicated location within the DSH that can be adjusted for a variety of configurations as required. From an Intra- Vehicular Activity (IVA) location, the TRWS uses the Robot Application Programming Interface Delegate (RAPID) control environment through the local network to remotely monitor and control vehicles and robotic assets located outside the pressurized volume in the immediate vicinity or at low- latency distances from the habitat. The multiple display area of the TRWS allows the crew to have numerous windows open with live video feeds, control windows, and data browsers, as well as local monitoring and control of the DSH and associated systems.
The novelty of the TRWS comes from the integration and configuration of various software and hardware elements within the context of the DSH environment. Controls, communications, power status, situational awareness information, and telemetry — though employing conventional and sometimes commercial off- the- shelf (COTS) equipment — are displayed in a unique operational environment that must compete with crew attention in a fully functional habitat. The TRWS RAPID software, hardware, structural configuration, ergonomics, and human factors combine to provide the crew with an efficient tool for carrying out mission remote asset control objectives.
This work was done by David S. Mittman, Alan S. Howe, and Recaredo J. Torres of Caltech; Jennifer L. Rochlis Zumbado and Kimberly A. Hambuchen of Johnson Space Center; and Matthew Demel and Christopher C. Chapman of JSC Jacobs Technology for NASA’s Jet Propulsion Laboratory. NPO- 48503
This Brief includes a Technical Support Package (TSP).
Telerobotics Workstation (TRWS) for Deep Space Habitats
(reference NPO-48503) is currently available for download from the TSP library.
Don't have an account?
Overview
The document is a Technical Support Package for the Telerobotics Workstation (TRWS) designed for Deep Space Habitats (DSH), prepared under the sponsorship of NASA. It outlines the capabilities and applications of the TRWS, which is intended for intra-vehicular activity (IVA) control, monitoring, and piloting of vehicles and robotic assets in the vicinity of deep space habitats.
The TRWS is a sophisticated system developed by the Jet Propulsion Laboratory (JPL) at the California Institute of Technology. It features a vertically adjustable workstation that enhances operator comfort and efficiency. The design allows for a larger and more stable surface for placing essential equipment such as keyboards, joysticks, mice, and notebooks, which is crucial for effective operation during missions.
Key results from the HDU/DSH/HRS TWRS D-RATS tests conducted in September 2011 are highlighted, including a successful operation where the Centaur 2 robotic asset was driven for 530 meters, surpassing the mission success criteria of 100 meters. This achievement demonstrates the TRWS's capability to control robotic systems over significant distances, which is vital for deep space exploration.
The document also emphasizes lessons learned from the testing phase, particularly the importance of increasing the computer display area to accommodate non-overlapping windows, thereby improving the operator's ability to manage multiple tasks simultaneously. This feedback is essential for refining the TRWS design and functionality.
The Technical Support Package serves as a resource for understanding the technological advancements in telerobotics and their potential applications in space exploration. It is part of NASA's Commercial Technology Program, aimed at disseminating aerospace-related developments that have broader technological, scientific, or commercial implications.
For further inquiries or assistance, the document provides contact information for the Innovative Technology Assets Management at JPL, encouraging collaboration and partnerships in the field of aerospace technology.
Overall, the document encapsulates the innovative spirit of NASA's research and development efforts in telerobotics, showcasing the TRWS as a critical tool for future deep space missions and the exploration of extraterrestrial environments.