
The disclosed device provides key elements to enabling compact exercise machines that overcome many of the disadvantages of the current spacesuit, as well as medical prosthetics and exoskeletons. The mechanism is based on switchable, curved, leaf, and torsion spring mechanisms that support the user joints and at the contact with the ground to enable high-speed, low-loss locomotion. The springs are primed with an actuator to counteract losses and recycle the user’s elastic energy in the locomotion. The mechanism is designed to be switchable and to allow for removing the springs from the structure for fine control. Adjustable hard-stops are embedded into each joint to prevent overextension and optimize the performance at each gait. The spring mechanisms are made from carbon fiber composites to reduce the weight of the system. The components of this mechanism can be structurally connected to each other via a mechanical clutch to form a symmetric lower-extremity system with a passive spring mechanism to reduce the requirement of the joints to dampen the impact forces and recycle some of the energy of walking and running.
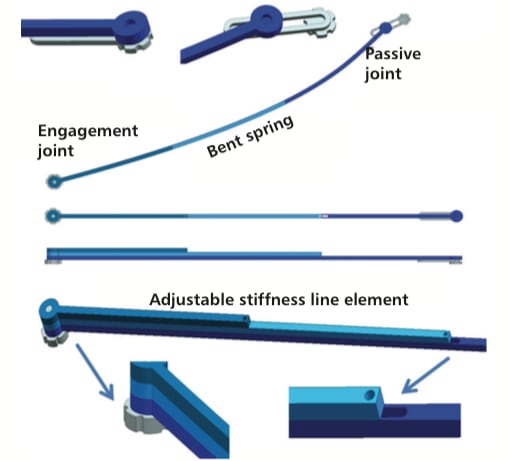
These springs are incorporated into the suit and structurally connected to each other by engaging a mechanism as a clutch at each joint to rigidize it to the related flexure. This configuration forms a symmetric lower-extremity suit with a passive spring mechanism.
This structure is used to reduce the requirement of the joints to dampen the impact forces and recycle some of the energy of walking and running. In addition, gearless ultrasonic motors can assist the spring displacement under extension and compression in order to augment the motion of the suit structure. The extensions and rotation of the springs are set to avoid possibility of overextension of a joint by using adjustable hard-stops. In addition, the connected flexures are designed to have adjustable stiffness by controlling the attachment points and the number of flexures that are optimal for different user actions.
These spring flexures are made controllable to adjust to the torque requirements, range of motion, and length of the adjacent links of each joint and the initial angular displacement. This spring-based mechanism enables a system that will mimic the power, energy, motion, and weight of the human hips, knees, and ankles. This mechanism allows tuning of the spring performance to minimize the peak motor requirements, thus producing a much lighter device. This approach of storing and releasing energy during the gait cycle supports the various motion possibilities related to walking, jogging, jumping, walking up and down slopes, and ascending and descending stairs.
The disclosed invention would support future human exploration in space where astronauts can be assisted in their ambulation by reducing the metabolism that is required, and thus help them address potential difficulties if they encounter significant loss of bones and muscles prior to their arrival to the specific planetary body.
This work was done by Mircea Badescu, Stewart Sherrit, and Yoseph Bar-Cohen of Caltech for NASA’s Jet Propulsion Laboratory. NPO-48462
This Brief includes a Technical Support Package (TSP).
Mobility Augmentation System Using Switchable Spring Mechanisms
(reference NPO48462) is currently available for download from the TSP library.
Don't have an account?
Overview
The document outlines a novel Mobility Augmentation System developed by NASA, which employs switchable spring mechanisms to enhance the mobility of users, particularly astronauts, individuals in rehabilitation, and those using prosthetic devices or exoskeletons. The primary goal of this system is to reduce the metabolic cost associated with ambulation, thereby improving the efficiency and effectiveness of movement in various environments, including space.
The disclosed mechanism features a passive spring system that supports key human joints—specifically the hips, knees, and ankles. This system incorporates adjustable stiffness link elements that can be customized for different activities such as walking, running, and weight carrying. The springs are designed to absorb and recycle energy during the gait cycle, which helps to dampen impact forces and minimize the energy required for movement. This is achieved through a combination of passive and active joints, allowing for independent engagement of multiple spring elements based on the user's activity.
The document emphasizes the importance of adjustable hard-stops to prevent overextension of joints and optimize performance during various gaits. The use of gearless ultrasonic motors is also mentioned, which assist in the extension and compression of the springs, augmenting the suit's motion. The system is designed to mimic the natural power and motion of human joints, making it lightweight and efficient.
Additionally, the document highlights the potential applications of this technology in space exploration, where astronauts may face challenges related to muscle and bone deterioration during extended missions. The system aims to provide support for mobility on planetary bodies, addressing the unique challenges posed by low-gravity environments.
The invention is positioned as a significant advancement over existing technologies, which often lack the flexibility and efficiency needed for practical use in prosthetics and exoskeletons. By integrating switchable spring mechanisms, the system not only enhances user mobility but also contributes to the overall reduction of metabolic costs associated with movement.
In summary, this document presents a comprehensive overview of an innovative mobility augmentation system that leverages advanced spring mechanisms to improve ambulation for various users, with a particular focus on applications in space exploration and rehabilitation.