
Spaceborne gimbal systems are typically bulky with large footprints. Such a gimbal system may consist of a forked elevation stage rotating on top of the azimuth motor, and occupy a large volume. Mounting flexibility of such a system may be limited.
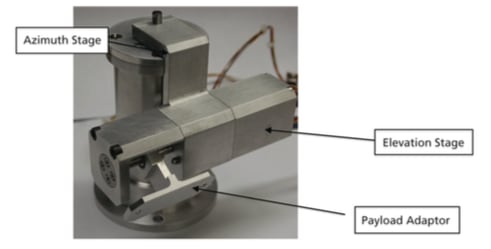
A low-mass, small-volume gimbal unit was developed that consists of two DC brushless motors, each rotating the payload about one of two orthogonal axes (see Figure 1). An elevation axis motor is located beside the azimuth axis motor, which reduces the height of the gimbal. An adaptor secured to the elevation axis supports the payload.
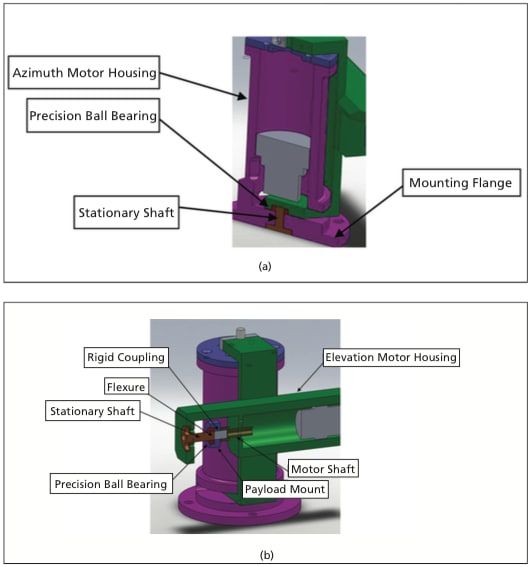
The bracket that holds the elevation stage is clamped at one end to the azimuth stage motor shaft. At the other end, this bracket is supported by a precision ball bearing, the outer race of which is pressed into the bracket, and the inner race of which rides on a short stationary shaft. The stationary shaft has an integral flange that is bolted to the azimuth stage housing. Thus, as shown in Figure 2(a), the bracket is supported at both ends by bearings: at the motor shaft end it is supported by the shaft end ball bearing in the azimuth motor, and at the other end it is supported by the external precision ball bearing.
The payload adaptor is similarly coupled to the elevation motor through an off-the-shelf flexure coupling to the motor shaft on one side and a precision ball bearing through a stationary shaft on the other [see Figure 2(b)]. As in the case of the elevation stage bracket, the outer race of the bearing is secured by a press-fit into the payload adaptor.
Although the design is suitable for a variety of motors, brushless DC motors were used with integral encoders for their smoothness of operation. These motors lack the cogging torque of a stepper motor, and the friction between brushes and a commutator found in a brushed DC motor. Both of these mechanisms are sources of torque variation that can compromise pointing accuracy in a gimbal. For both azimuth and elevation stages, DC brushless motors were used with encased encoders. This gimbal is a low-mass unit suitable for a small payload such as a small lasercom terminal or a small imager. The prototype unit has outer dimensions of approximately 127 × 127 × 127 mm. The gimbal may, however, be scaled to accommodate heavier payloads if desired.
The gimbal units may be used to manipulate various payloads such as remote sensing instruments, laser communications, and radar for space applications.
This work was done by Vachik Garkanian, Joseph M. Kovalik, and Martin W. Regehr of Caltech for NASA’s Jet Propulsion Laboratory. NPO-47824
This Brief includes a Technical Support Package (TSP).
Robust Gimbal System for Small-Payload Manipulation
(reference NPO-47824) is currently available for download from the TSP library.
Don't have an account?
Overview
The document outlines the development and features of a Robust Gimbal System for Small-Payload Manipulation, created by NASA's Jet Propulsion Laboratory (JPL). This gimbal system is designed to position payloads weighing up to 1.5 kg with high precision and repeatability, making it suitable for various aerospace applications.
The gimbal system consists of two motorized rotary stages: the elevation stage and the azimuth stage. The elevation stage is responsible for rotating the payload about a vertical axis, while the azimuth stage allows for rotation about a horizontal axis, enabling comprehensive manipulation and tracking of the payload. Both stages utilize off-the-shelf DC brushless servo-motors equipped with position feedback, ensuring accurate control and positioning.
A key feature of this gimbal system is its compact design. The elevation stage is ingeniously wrapped around the azimuth stage, which minimizes the system's footprint without compromising performance. This design allows for efficient use of space, making it ideal for applications where size and weight are critical factors.
The document also describes the mechanical coupling of the payload to the motors. The elevation motor is connected to the payload through a flexure coupling, which enhances the system's flexibility and precision. Additionally, a precision ball bearing supports the elevation stage on a stationary shaft, further contributing to the system's stability and accuracy.
Ongoing tests are being conducted to evaluate the positioning accuracy and repeatability of the gimbal system, ensuring that it meets the rigorous standards required for aerospace applications. The research and development of this technology are part of a broader initiative under NASA's Commercial Technology Program, aimed at making aerospace-related advancements available for wider technological, scientific, and commercial use.
In summary, the Robust Gimbal System for Small-Payload Manipulation represents a significant advancement in the field of payload positioning technology. Its compact design, high precision, and reliable motorization make it a valuable tool for various applications, particularly in the aerospace sector. The document serves as a technical support package, providing insights into the system's design, functionality, and potential applications.