
Linear-translation motors containing inertial-reaction masses driven by magnetostrictive actuator elements are undergoing development. These motors could be used to make fine position adjustments in diverse scientific and industrial instruments that operate at temperatures ranging from near absolute zero to room temperature; for example, they could be used to drive translation stages in scanning tunneling microscopes that operate at liquid-helium temperature (4 K), or to move cryogenic-temperature optical elements that must be located at long but precise distances from each other (as in interferometers). [These motors should not be confused with proposed magnetostrictive motors that would move in "inchworm" fashion and would be used for similar purposes, described in "Magnetostrictive Actuators for Cryogenic Applications," NASA Tech Briefs, Vol. 20, No. 3 (March 1996), page 84.]
An inertial-reaction motor includes a platform that slides along a pair of tracks. One end of an electrically driven linear actuator is mounted on the platform, and a substantial mass (the inertial-reaction mass) is attached to the other end. The actuator can be made to move the mass, rapidly or slowly, along a short range parallel to the track. If the mass is driven with sufficient acceleration that the reaction force overcomes the friction between the platform and the track, then the platform moves a short distance along the track. If, following a rapid stroke in the forward direction, the mass is driven relatively slowly in the reverse direction, then the reaction force is insufficient to overcome friction, and thus the platform remains in the position to which it moved during the forward stroke. By driving the actuator with a sawtooth waveform at the appropriate amplitude and frequency, one can cause the actuator to repeat this action and thus move the platform in a succession of small steps. The total distance traveled can range from a single step to the length of the tracks, which could be as much as 1 m or more in some instruments. The motion can be reversed by inverting the waveform driving the actuator.
The principle of operation as described thus far does not call for any particular type of linear actuator. Heretofore, inertial-reaction motors have been constructed with piezoelectric actuators. However, piezoelectric actuators exhibit diminished performance as temperature decreases into the cryogenic range; at liquid-helium temperatures (about 4 K), piezoelectric actuators perform poorly.
Unlike piezoelectric actuators, magnetostrictive actuators perform well at temperatures from ambient down to 4 K and below; indeed, magnetostrictive actuators reach their performance peaks at cryogenic temperatures, while at room temperature, they produce strokes about 7 times as large as those of comparable piezoelectric actuators. Moreover, if the magnetostrictive linear actuators for cryogenic inertial-reaction motors are constructed with superconducting solenoids, then the conversion of electrical to mechanical energy could be more efficient.
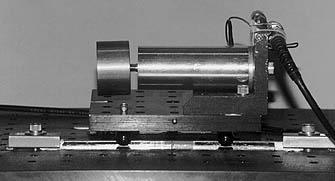
The feasibility of magnetostrictive inertial-reaction motors has been demonstrated in tests of such a motor built with a commercial room-temperature magnetostrictive actuator (see figure). Incremental motions as small as 100 nm have been achieved. With further development, it should be possible to achieve increments as small as 10 nm.
This work was done by Christian Lindensmith and Robert Chave of Caltech for NASA's Jet Propulsion Laboratory. For further information, access the Technical Support Package (TSP) free on-line at www.nasatech.com under the Mechanics category, or circle no. 134 on the TSP Order Card in this issue to receive a copy by mail ($5 charge). NPO-20153