
Integrated circuits that exploit optical flow to sense motions of computer mice on or near surfaces (“optical mouse chips”) are used as navigation sensors in a class of small flying robots now undergoing development for potential use in such applications as exploration, search, and surveillance. The basic principles of these robots were described briefly in “Insect-Inspired Flight Control for Small Flying Robots” (NPO-30545), NASA Tech Briefs, Vol. 29, No. 1 (January 2005), page 61. To recapitulate from the cited prior article: The concept of optical flow can be defined, loosely, as the use of texture in images as a source of motion cues. The flight-control and navigation systems of these robots are inspired largely by the designs and functions of the vision systems and brains of insects, which have been demonstrated to utilize optical flow (as detected by their eyes and brains) resulting from their own motions in the environment.
Optical flow has been shown to be very effective as a means of avoiding obstacles and controlling speeds and altitudes in robotic navigation. Prior systems used in experiments on navigating by means of optical flow have involved the use of panoramic optics, high resolution image sensors, and programmable image-data-processing computers. These systems are large, complex, and computationally expensive, and not readily scalable for inclusion in miniature robots, for which there are severe design requirements to limit power demand, mass, and size.
The present development exploits the recent proliferation and commercial availability of optical mouse chips. Each optical mouse chip includes a low-resolution (16 × 16) array of photosensors, and circuitry that compares consecutive image frames to compute the optical flow across the array in two dimensions, in a manner analogous to that of an element in an insect’s compound eye. In a computer mouse, the optical flow is used to track the movement of the mouse on a mouse pad or equivalent surface; in a flying robot of the type now under development, the optical flow serves as a measure of two-dimensional velocity relative to nearby surfaces and objects. The use of optical mouse chips instead of the imaging- and-computing systems described above offers advantages of compactness, low mass (15 to 20 g per chip), low power demand (42 mW per chip), low cost (about $10 per chip in year 2004), redundancy, high speed (frame rates up to 2.3 kHz), and parallel processing.
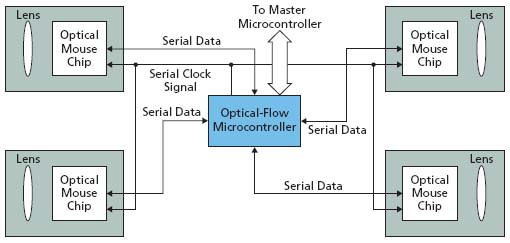
In a hierarchical control architecture proposed for subsequent development of a flying robot, the outputs of several optical- mouse-type navigation sensors would be fed to a microcontroller (see figure) that would utilize the combined optical flow information to determine the motion of the robot relative to the environment. This microcontroller would, in turn, communicate with a master microcontroller, which would combine information from various sensing subsystems, determine the priority to be assigned to the information from each subsystem, and relay control information to affect locomotion. This hierarchical architecture is analogous to the neural structures of flies.
This work was done by Sarita Thakoor and John M. Morookian of Caltech; Javan Chahl and Dean Soccol of Australian National University; and Butler Hine and Steven Zornetzer of NASA Ames Research Center for NASA’s Jet Propulsion Laboratory. For further information, access the Technical Support Package (TSP) free online at www.techbriefs.com/tsp under the Electronics/Computers category.
In accordance with Public Law 96-517, the contractor has elected to retain title to this invention. Inquiries concerning rights for its commercial use should be addressed to:
Innovative Technology Assets Management
JPL
Mail Stop 202-233
4800 Oak Grove Drive
Pasadena, CA 91109-8099
(818) 354-2240
E-mail: This email address is being protected from spambots. You need JavaScript enabled to view it.
Refer to NPO-40173, volume and number of this NASA Tech Briefs issue, and the page number.
This Brief includes a Technical Support Package (TSP).
Insect-Inspired Optical-Flow Navigation Sensors
(reference NPO-40173) is currently available for download from the TSP library.
Don't have an account?
Overview
The document is a Technical Support Package from NASA, specifically focused on insect-inspired optical-flow navigation sensors, referenced as NPO-40173. It aims to disseminate findings from aerospace-related developments that have broader technological, scientific, or commercial applications. The research emphasizes the design and implementation of optical flow devices that mimic the visual processing capabilities of insects, which can significantly enhance navigation systems for various applications, including unmanned aerial vehicles (UAVs).
The document outlines the evolution of the optical flow device, starting with a general-purpose implementation that served to test the concept. A refined version was developed, which is more compact and can be interfaced with computers using just three digital I/O pins. This newer device, the ADNS2051, operates as a stand-alone unit but utilizes a proprietary serial bus interface for communication with modular avionics systems.
Key findings from the research indicate that the optical flow chip is designed to measure rapid image motion, which is crucial for effective navigation. However, the low resolution of the imaging plane necessitates high rates of motion to achieve meaningful output signals. The document notes that the field of view produced by the optics was initially too wide, suggesting that a narrower field of view (between 5° to 10°) would be more suitable for terrestrial UAV operations. This adjustment is important for optimizing light capture and minimizing contrast outages in images.
The document also discusses the optical design requirements, stating that a minimum illumination of 80 mW/m² at the integrated circuit (IC) is necessary for proper operation, with an optical design capable of supporting frame rates of 2300 frames per second (fps). A focal length of 25mm is proposed as a compromise between system size and object resolution.
Overall, the Technical Support Package serves as a resource for understanding the advancements in optical flow technology inspired by biological systems, highlighting its potential applications in aerospace and beyond. It also provides contact information for further assistance and access to additional resources from NASA's Scientific and Technical Information Program Office.