
Most autonomous vehicles have been tested out in city environments, where tech companies like Google can build intricate 3D maps that lay out the exact position of every lane, curb, off-ramp, and street sign.
But what about areas with less definable features, like country roads or a desert?
The need for dense 3D maps limits the places where self-driving cars can operate, say researchers from the Massachusetts Institute of Technology .
A “MapLite” framework, developed by director of MIT’s Computer Science and Artificial Intelligence Laboratory (CSAIL) Daniela Rus and graduate student Teddy Ort, allow self-driving cars to navigate roads – with just GPS and sensors as a guide.
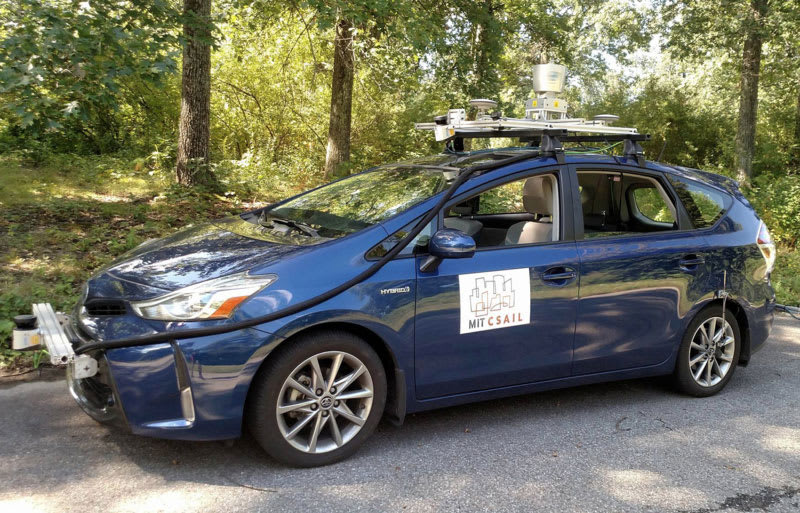
Using a laser scanner, an inertial measurement unit (IMU), and the simple GPS data you’d find on Google Maps, the MIT team set up a Toyota Prius to autonomously maneuver through multiple unpaved country roads in Devens, Massachusetts. The MapLite technology reliably detected the road more than 100 feet in advance.
“A system like this that can navigate just with on-board sensors shows the potential of self-driving cars being able to actually handle roads beyond the small number that tech companies have mapped,” said CSAIL’s Teddy Ort, who was a lead author on a related paper about the technology.
Teddy Ort spoke to Tech Briefs about how MapLite will help autonomous vehicles take a trip off the beaten path.
Tech Briefs: How is the technology able to get you where you need to go, especially without 3D maps?
Teddy Ort: While MapLite doesn’t use the dense 3D maps that are typically used to do autonomous navigation, we do use a minimalist map in order to set a start and end point, and determine which road segments need to be traversed. For comparison, a dense 3D map of a small urban area would require around 200 GB for storage, while the maps used in MapLite for the same area would only require about 3GB.
Tech Briefs: What are the sensors able to sense?
Ort: During testing, a Velodyne Laser Scanner sensor was used primarily to detect the road from the surrounding areas to determine a safe path for driving. However, this same sensor is also commonly used for detection of moving obstacles such as other vehicles and pedestrians. A complete autonomous driving solution would require those systems as well.
Tech Briefs: Why is this kind of system so valuable, especially compared to current self-driving offerings?
Ort: Many of the existing autonomous driving programs have shown very impressive results. However, reliance on maps poses some fundamental limitations to the range of environments in which these systems could potentially operate. Our approach aims to forego these maps to enable autonomous driving in rural areas where building and maintaining dense maps would be much more difficult.
Tech Briefs: What mechanisms are in place to ensure safety?
Ort: As an experimental research platform, MapLite was tested on roads closed to the public for safety reasons. Furthermore, a safety driver was always in the driver seat ready to take back control of the vehicle if that had become necessary.
Tech Briefs: What environments is this ideal for? And what environments are most challenging to operate in?
Ort: MapLite was designed for rural areas where the many miles of roads and unstructured, ever-changing environment combine to make a particularly difficult area for building maps. Urban areas, on the other hand, are much more amenable for map-based systems. Furthermore, the complex intersections and traffic patterns common in urban areas could pose a more difficult challenge for a MapLite system.
Tech Briefs: Can you describe the test? How did you feel in the driver’s seat?
Ort: We had actually begun working in this area using maps as is typically done. We sometimes spent many hours collecting sensor data, and building dense maps, only to find that when we wanted to drive autonomously just a few days later, we were unable to because the trees had lost their leaves or snow had fallen, causing the maps to become outdated.
When testing MapLite, one thing that stood out was how quick and easy it was to get started. I could just show up and push start and the car would start driving without having to prepare maps ahead of time. That was an amazing feeling.
Tech Briefs: What’s next regarding the development/testing of the technology?
Ort: Our goal is to further expand the diversity of different road types that it can handle, and ultimately have MapLite be as reliable as mapped systems, but with a much wider range.
“MapLite” research was co-written by Ort, Rus, and PhD graduate Liam Paull, who is now an assistant professor at the University of Montreal. The MIT team will present the paper in May at the International Conference on Robotics and Automation (ICRA) in Brisbane, Australia.
What do you think? Can self-driving cars operate effectively without a detailed 3D map? Share your questions and comments below.
Transcript
00:00:00 [MUSIC PLAYING]
00:00:41