
Robotic system designers should choose the right power source for the job. Often, electric motors are chosen without thinking about the benefits of hydraulics or pneumatics. For applications where precise control of large forces and smooth motion are required, or applications that require “forgiveness” in the motion, fluid power can deliver significant benefits compared to electromechanical motion.
Power Source
Conventional electric motors are well suited to applications where the predominant form of motion is rotational. They are easy to control and can be the least expensive power source in small systems that have few axes or light loads. Linear electric motors, although more expensive, have advantages in positioning applications where motion is linear and where quick direction changes are required. Hydraulic motors and actuators can do practically everything that electric motors can and have several advantages in heavy machinery applications.
Hydraulic actuators can lift and hold heavy loads without braking, and can move heavy objects at slow speeds or apply torque without the need for gearing, while consuming less space and producing less heat at the actuator than electric motors. Electric motors must be sized for the maximum load applied; hydraulic pumps need to be sized only for the average load. Hydraulic actuators are also comparatively small. The hydraulic advantage is greatest when there are breaks in the motion, as the accumulator stores energy while the system is not moving. Electric motors make sense in applications with continuous motion.
An electric motor is typically located close to or directly on the motion axis. In fluid power systems, the air or hydraulic pump may be located remotely. Only the accumulator and control valves need to be located near the actuators. This can make fluid power an ideal motive force for robotics applications with many axes. The pump can be mounted in a base location, keeping the weight on the robotic arms low. Sharing a pump between multiple-axis actuators can result in a cost per axis that is lower than the equivalent system employing electric motors. With hydraulics, pressure can be held constant without applying significantly more energy. Driving an electric motor to apply constant torque could cause overheating. In material transfer applications that are prone to binding due to mishandling of material, fluid power may be more forgiving of jams than electromechanical power.
Pneumatic grippers and rotators, along with vacuum devices, are common components of many industrial robotic systems — pneumatic motion axes requiring precise positioning less so. The natural “give” of pneumatic motion technology, while a detriment to fast pick and place applications, can be of benefit elsewhere, such as in physical therapy. The inherent “give” is a safety benefit. Acceleration-limiting algorithms (active damping) can make electric and hydraulic axes mimic this behavior, but such is dependent on proper functioning of various sensors and algorithms. If something fails, the axis could move suddenly with full speed and force. Hydraulics have advantage when heavy or unpredictable loading can overload the actuator; pneumatics can have advantage when softer motion is desired. Electric actuators do not do well in either case, having the possibility of harsher motion than pneumatics and handling overloads less gracefully than hydraulics.
Fluid Power & Design
The most common use of fluid power is linear motion and the most important factor in planning linear motion systems is sizing the actuator cylinders. Clearly, the cylinder selected needs to be long enough for the stroke required. The cylinder choice is crucial, since the natural frequency of the system is roughly proportional to the diameter of the cylinder. The natural frequency is fundamental in determining the maximum acceleration rate the system can achieve under control. If a system needs to accelerate twice as quickly, the natural frequency of the system must be twice as high. To do this, the cylinder diameter must be twice as big.
After choosing the piston/cylinder diameter for the acceleration, the pump size must be calculated to provide air or fluid flow for the speed and acceleration needed. If the pump is too large, fluid and the power required to pump it may be wasted. The required volume of oil flow in a hydraulic system must match the required change in internal volume of the cylinder over time. To achieve double the acceleration requires double the diameter or four times the surface area. With four times the area and twice the speed, the oil flow must be eight times higher.
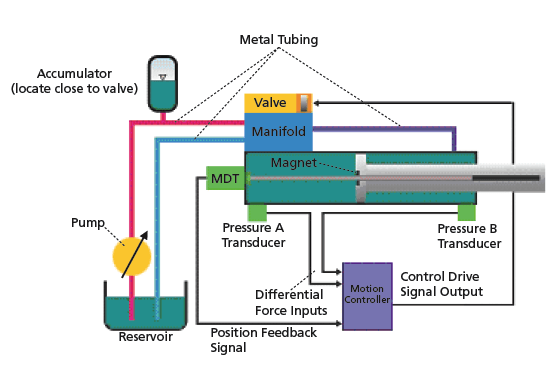
Upon determining the pump size, the next step is to size the accumulator. The accumulator in a fluid power system serves two purposes. It serves as a buffer, allowing the power requirements from the pump to be time-averaged, and it allows the system pressure to remain relatively constant, so that the effects of motion control inputs remain relatively constant. This avoids the need to continually change the control input-response relationships used by the motion controller to maintain precise control. A good rule of thumb is to make the accumulator large enough so that the pressure doesn’t change by more than 10% during the system’s operating cycle. Further, the physical location of the accumulator needs to be considered in order to minimize system pressure losses — it should be located close to the valve, not the pump.
When it comes to precise control of the actuator, there are two types of valves used in hydraulic systems: servo and proportional. With servo valves, a linear increase in the current through the valve coil directly moves the spool, causing a linear increase in the flow of oil through the valve. Proportional valves have position feedback on the spool, which the valve amplifier uses to linearize the behavior of the valve. Proportional valves are generally less expensive and more tolerant of contaminants than servo valves, but these benefits come at the expense of performance. Precise hydraulic motion control requires the use of servo-quality proportional valves. For maximum system responsiveness to control inputs, valves should be sized to match the cylinder’s flow needs by providing the required flow plus another 10 to 20%. If the valve is too large compared to the size of the cylinder, control of the valve will be coarse, as only a small part of the control range is being used.
For controlling pressure, sensors should be placed in the bottom of the cylinders on either end where they are not affected by trapped air and where there is less oil motion. A common mistake is to mount the pressure sensor in the manifold, where the Venturi effects of moving oil can decrease the accuracy of pressure readings. Turbulence in the oil flow may reduce the Venturi effect, but the pressure at the manifold may not be the same as that in the cylinder.
Position information is typically calculated in linear motion systems driven by a conventional electric motor using inputs from quadrature encoders connected to the motor shaft. Although this is convenient, it can lead to imprecise motion if backlash exists in the system. Using linear magnetostrictive displacement transducers (LMDTs or MDTs) avoids this. MDTs measure absolute position and do not require homing, and have pressure and temperature specifications that allow them to be inserted directly into hydraulic cylinders.
Controllers & Fluid Power
Critical to delivering the benefits of using fluid power in robotics applications is using a motion controller that is designed for the job. System designers should look for an electronic motion controller that can coordinate multiple axes simultaneously by “gearing” one axis motion to another, so that precise, repeatable motion can be assured as throughput is increased. The controller should support direct connection to proportional valves in order to generate precise hydraulic motion. The controller should have the ability to perform smooth transitions between position and pressure control modes so that discontinuities in the motion are avoided that would otherwise impact performance and quality of output, and it should support the execution of high-level commands, such as higher order function interpolations, to smooth the motion without requiring complex and time-consuming, low-level programming. The controller should come with motion simulation capability and automated tuning tools using graphics for diagnostic and setup purposes in order use selectable versions of control algorithms for optimizing motion.
The controller should also easily communicate directly to factory or fieldbus networks, since it is desirable that the machine be integrated into a larger plant environment with production information available to enterprise quality and production control systems. Such is also useful for hybrid control systems combining fluid and electro-mechanical motion.
Tuning the Motion
Tuning fluid power systems is similar to tuning electromechanical systems. Electric servos have two main modes of operation. In velocity mode, the speed is proportional to the control output from the motion controller to the drive amplifier. In torque mode, the torque or acceleration of the servo is roughly proportional to the control output to the amplifier. Velocity mode is more intuitive than torque mode and is easier to set up by running the system with open loop controls. In torque mode, the system must always be on closed loop control because a constant open loop voltage will cause the servomotor to accelerate. Sending a zero control output does not cause the servo to stop, it just allows the servo to coast to a stop.
Another difference between electric servos and fluid power actuators is that electric servos typically require only one set of gains. Fluid power motion controllers require two sets of gains for linear cylinder applications, one for extending and one for retracting. This is because the surface area on either side of the cylinder piston is different because of the cylinder rod. This difference in area causes the maximum force — and therefore system gain — to be greater when the piston is extending than when retracting. An electric servo controller will have a hard time controlling a hydraulic system because it usually has only one set of gains and as such, can be tuned to work properly in one direction only. Having two sets of directional gains in a fluid power motion controller is also handy in vertical applications where the load changes greatly depending on whether the system is moving up or down.
Hydraulic systems operate in a velocity mode, as the flow of oil is, ideally, proportional to the control output from the motion controller; hence, they share the advantages of simpler tuning with velocity-mode electric motor controls. Fluid power motion controllers have benefited from recent advances in the performance of electro-hydraulic actuators, sensors, and motion controllers. Robotic machine designers are provided a wealth of options, including a choice of power sources to drive their designs. Using the best power source can improve machine productivity and cut lifecycle costs.
This article was written by Richard Meyerhoefer, Regional Applications Specialist at Delta Computer Systems, Inc. For more information, contact Mr. Meyerhoefer at