
The sense of touch is complex, and an instructor at the University of California – Santa Barbara (UCSB) has the technology to prove it. Yon Visell, assistant professor in the Department of Electrical and Computer Engineering, and his students designed an apparatus that captures the unique vibration patterns associated with touch-specific actions, from gripping a coffee mug to tapping on a flat surface. The findings could support new applications in prosthetics, robotics, and virtual reality.
Sensing the Subtleties of Touch
To date, there are very few technological sensing approaches that have attempted to capture the submodalities within touch — the more subtle interactions between our hands and our surroundings. The UCSB researchers determined that a widespread area of the hand has access to sensory information, in the form of vibrations, that is generated at the fingertips.
When a fingertip touches an object, the contact generates transient, wave-like mechanical signals that propagate a distance within tissues. Each action — the dragging of a finger or the picking up of an object, for example — elicits specific vibration signatures within the skin.
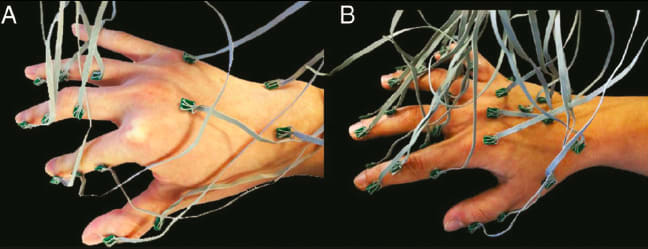
By bonding an array of custom accelerometers, or vibration sensors, along the sides and backs of a subject’s fingers and hands, Visell captured the signals traveling beyond the fingertips and up past the arm.
By characterizing the signals and unique vibration information, the team could accurately determine the hand’s action, indicate how the object was being manipulated, and even reveal the object itself. Using support vector machine (SVM) classifier algorithms, the researchers demonstrated that the spatial patterns of vibration accurately encoded the movements of the hand.
Visell suggests that the hand, much like the ear, uses vibrations produced through contact to infer what the hand is touching and how an object is being handled.
“If you tap your finger on a surface, these signals propagate pretty quickly throughout the hand and reach at least as far as the wrist, and in fact beyond the wrist,” said Visell. “If you do something else with your hand, like grasp a coffee mug or tap multiple fingers, you elicit rather different patterns of vibration propagation within the skin.”
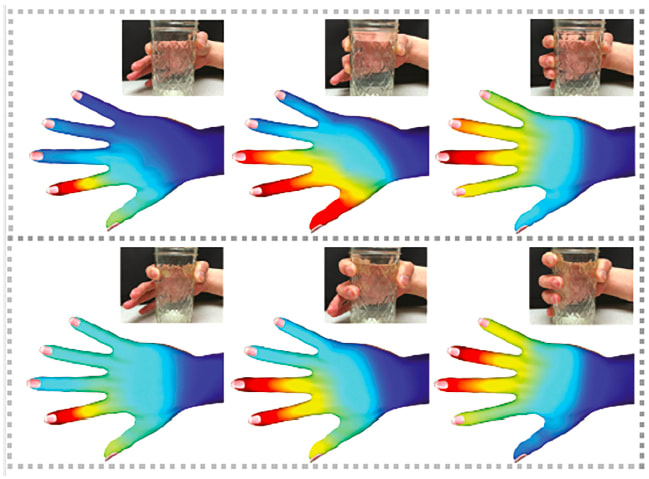
Vibration patterns produced by tapping a single finger, for example, were shown to be stronger than those made by grasping or gripping motions. Tapping the index and middle finger alone carried vibrations across the entire surface of the hand. The size of the object itself — a glass, for example — was also found to influence the specific vibrations and their travel path.
Although the most energetic vibrations were revealed to be at the ends of the fingers that contacted the object, Visell and the UCSB lab students determined that the vibrations typically transmit beyond the fingers, and even onward to other fingers that were not in contact with the object.
The propagation past the fingertips may help to explain intriguing touch capabilities, including how anesthetized hands still maintain the ability to feel fine surface detail and perform discriminating tasks.
New Applications
As upper-limb motorized prosthetics become more advanced, Visell’s findings could be used to provide prosthetic wearers with touch feedback. The UCSB results indicate that touch sensing can be performed using sensors distributed far away from the area of contact, yielding rich information about touch interactions with objects.

“This suggests a possible approach to tactile sensing for upper limb prosthetics in which vibration sensors, like the accelerometers used in our study, are embedded at sparse locations throughout the limb,” said Visell.
Through funding from Google, the team is beginning to design interfaces that are mechanically well adapted to biological tissue. The interfaces, which consist of wearable soft actuator arrays worn on the hands and wrists, conform to the skin and can potentially reproduce the signals.
“I suspect [within a year] we’ll start to be able to elicit touchlike sensations at the far ends of the fingers, the tips of the fingers, where you’d normally touch things, even using wearable interfaces that are positioned on more proximal parts of the hand, like on the wrist,” said Visell.
As emerging virtual reality technologies like the Oculus Rift headset hit shelves, new touch capabilities could also be used to enhance the VR experience. Visell’s work demonstrates that distributed patterns of vibration could provide valuable data and reproduce feelings of touch in the virtual environments where no physical objects are present.
Ultimately, the UCSB laboratory study revealed the multifaceted nature of touch — an important concept for sensor technology-makers to grasp.
“Touch is not one thing,” said Visell, “Through technologies like these, it’s going to be possible to utilize touch both as input and output, both as a way to sense the world and to interact within the world in ways that people haven’t thought about yet.”
This article was written by Billy Hurley, Associate Editor, NASA Tech Briefs. For questions and comments, email