
The recent introduction of uninhabited aerial vehicles [UAVs (basically, remotely piloted or autonomous aircraft)] has spawned new developments in autonomous operation and posed new challenges. Automated aerial refueling (AAR) is a capability that will enable UAVs to travel greater distances and loiter longer over targets. NASA Dryden Flight Research Center, in cooperation with the Defense Advanced Research Projects Agency (DARPA), the Naval Air Systems Command (NAVAIR), the Naval Air Force Pacific Fleet, and the Air Force Research Laboratory, rapidly conceived and accomplished an AAR flight research project focused on collecting a unique, high-quality database on the dynamics of the hose and drogue of an aerial refueling system. This flight-derived database would be used to validate mathematical models of the dynamics in support of design and analysis of AAR systems for future UAVs. The project involved the use of two Dryden F/A-18 airplanes and an S-3 hose-drogue refueling store on loan from the Navy (see Figure 1). In this year-long project, which was started on October 1, 2002, 583 research maneuvers were completed during 23 flights.

In the first phase of the project, the aerial refueling store (ARS) was instrumented and fully integrated with one of the F/A-18A airplanes — an integration that had not previously been accomplished. After conducting envelope-expansion flights in December 2002 for this F/A-18A airplane to carry and operate the ARS, the project team focused on outfitting both F/A-18A airplanes with a pair of video cameras to record the movement of the hose-and-drogue system. Building on the heritage of technological developments of the Autonomous Formation Flight (AFF) program, the dynamics of the hose and drogue were investigated at altitudes between 7,500 and 30,000 feet (between 2.3 and 9.1 km), and indicated airspeeds ranging from 195 to 300 knots (100 to 154 m/s). The effects of flight conditions, the weight of the hose, the weight of the tanker (the airplane carrying the ARS), and the approach velocity of the receiver (the other airplane, playing the role of an airplane to be refueled) on the response of the hose and drogue were explored in increments. A Global Positioning System (GPS)-based relative-positioning capability developed in the AFF program was used to guide the receiver into the proper position behind the tanker. Post-flight processing of the video images yielded data on the position and velocity of the hose/drogue system.
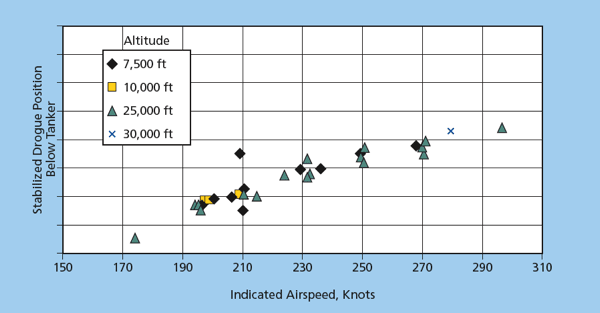
The free-stream position of the drogue (see Figure 2), the drag upon the drogue, and the effects of turbulence upon the drogue were investigated. Also investigated were the damping characteristics of the hose and the area of influence — the region around the drogue wherein there is a discernable effect on the drogue.
Similarly to the research of the AFF program, the research of the AAR program included exploration of many avenues, including video tracking and calibration methods, and flight-test and piloting techniques. The unique configuration of the airplanes enabled the first-ever in-flight thrust measurement of drag on the hose and drogue. It also enabled synchronization of the measurement of the hose and drogue position relative to the tanker and receiver with both GPS measurements and data acquired aboard both airplanes. Preliminary analysis of the video-derived data is complete.
This work was done by Jennifer L. Hansen, James E. Murray, Glenn Bever, Norma V. Campos, and Gerard Schkolnik of Dryden Flight Research Center. For further information, contact the Dryden Innovative Technology Transfer Partnerships Office at (661) 276-3449. DRC-04-13