
Advances in motion control technology have prompted a new debate — do hydraulic cylinders or electric linear actuators offer the best solution for a linear motion application? Hydraulic cylinders provide high force at an affordable cost. Hydraulics are rugged, relatively simple to deploy, and deliver a low cost per unit of force. However, electric rod actuators (electric cylinders), particularly those with roller screws, have attained increasingly higher force capacities while becoming more flexible, precise, and reliable.
Designers need to consider the performance and cost of each technology. This analysis should begin with a comparison of key parameters: force capabilities, motion control, system footprint, temperature tolerance, data collection, environmental concerns, and life cycle costs (Figure 1).
Key Parameters
Force: Hydraulic cylinders have high operating pressures [1800 to 3000 psi (124.1 to 206.8 bar)]. Because Force = Pressure × Area, even a 3-inch cylinder at 2200 psi can achieve 15,000 lbf (66.3 kN). Roller screw-powered electric linear actuators can deliver forces of over 50,000 lbf (225.5 kN), which is sufficient for many applications.
In an electric actuator, force is generated instantaneously. The electrical current that passes through the servo motor produces torque that drives the roller screw and generates force immediately. A hydraulic actuator must wait for pressure to build until force is achieved, thereby slowing response, or must store pressure (energy) constantly, which creates inefficiency.
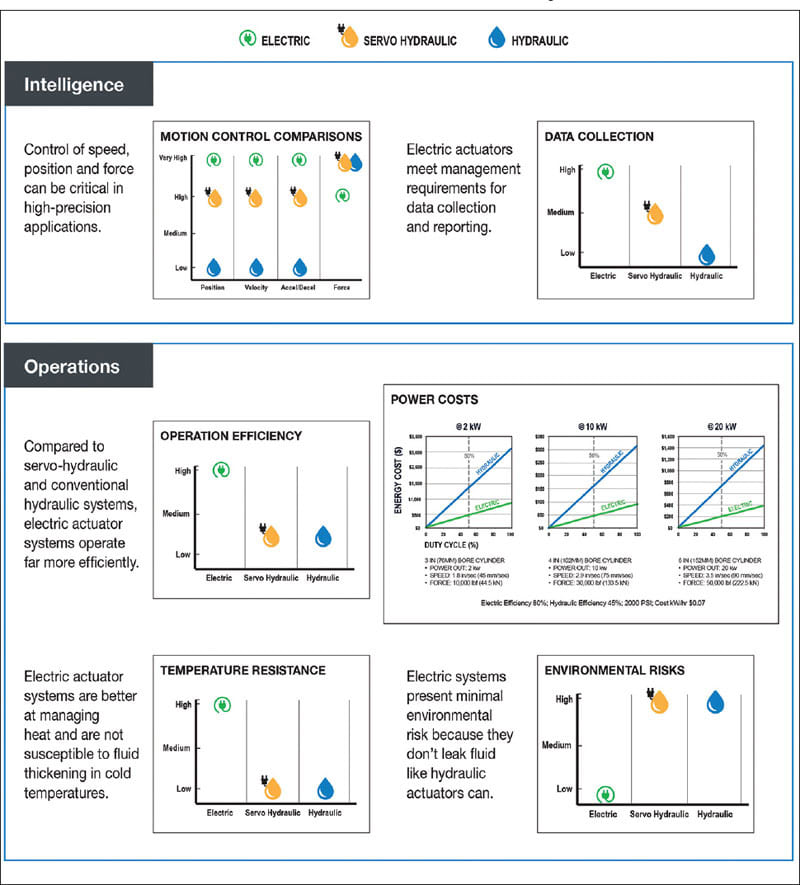
Motion Control: A hydraulic actuator works best in uncomplicated, end-to-end applications. An electric actuator with servo drive/motor offers a large amount of control over position, velocity, acceleration/deceleration, output force, and more. Adjustments can be made on the fly, and accuracy and repeatability are better than hydraulics.
System footprint: A hydraulic cylinder offers a compact footprint at the work point, but the hydraulic power unit (HPU), which regulates oil pressure and flow, requires a lot of floor space. An electric actuator may have a larger footprint at the work point, but has a smaller overall system footprint (usually a fraction of that of a hydraulic cylinder plus HPU).
Temperature tolerance: Hydraulic cylinders can be temperature-sensitive. Cold results in sluggish and inconsistent hydraulic actuator performance. In higher temperatures, oil degrades and seals fail.
Electric actuators can be selected to run at a desired temperature for the given amount of work required. They can be specified with optional extreme temperature grease for fast response in the cold.
Data collection: Standard hydraulic actuation systems do not have data-collection capabilities and require the addition of sensors or servo-hydraulics to attain the ability to gather process information. Sensing capability is built into an electric actuator's servo system through an encoder and current control (Figure 2).
Environmental risks: Hydraulic systems are prone to oil leaks that can create safety hazards, contaminate products, and pollute the environment. Electric actuation does not pose that environmental risk.
Life cycle costs: Hydraulic cylinders offer long life when maintained properly. However, maintenance (new seals, oil and filters) can mean machine downtime. If an electric actuator is sized correctly for the application, no maintenance is required so there is no downtime.
Hydraulic systems are 40-55% efficient in converting electrical power to motion. Electric linear actuator systems typically operate at 75-80% efficiency.
Converting from Hydraulic to Electric
For many applications, electric actuation systems have a lower cost of ownership than hydraulic systems. The impetus to convert hydraulic to electric is clear, but the process of making the conversion may seem daunting. Following are tips for making the conversion successful.
The first and most important thing to remember when planning a conversion is to avoid sizing for fluid power. Because of commonly-occurring fluctuations in fluid pressure and the low cost of fluid-powered cylinders, it is typical that these cylinders are sized at two or three times larger than what is required by the application. An engineer may consider this over-sizing to be insurance.

Because Force = Pressure × Area, as a cylinder gets bigger, its force capabilities grow. As the bore and oil pressure of a cylinder increase, the output force capability grows rapidly. The force output of an over-sized cylinder is often much higher than what the application specifies. In this way, the practice of over-sizing can obscure an application's actual force requirements, making them appear quite high when in fact they are significantly lower than the cylinder's rating.
This creates two problems for conversion to electric actuation. First, it may seem the application's force requirement is much higher than what an electric linear actuator can deliver. It may look impossible to convert the application to electric. Secondly, electric actuators can have a higher purchase price than hydraulic cylinders. If applied to electric actuators, over-sizing can lead to unaffordable prices.
Actual Force Requirements
An accurately-sized electric linear actuator will provide long service life, improved performance, and high efficiency with little maintenance, making it a lower total cost of ownership alternative. But if the application's force requirements have been overstated due to hydraulic cylinder over-sizing, how can an engineer get to the true specifications? Here are three suggested methods:
Determine peak force. Meter down the pressure in the hydraulic system until the cylinder can barely do the work. This is a good approximation of the peak force. Use the actual pressure in the Force = Pressure × Area formula to get the actual force.
A warning: this process will only identify the peak force of the application rather than mapping the force over the full extend and retract cycle (key information for electric actuator sizing). Assuming peak force across the entire stroke will dramatically reduce the estimated life of the actuator. (Use the L10 life formula to calculate estimated life for electric roller screw actuators.)
Install a load cell. Use a load cell to measure the force profile over the cylinder's entire stroke. This will provide all the force information needed to accurately size an electric actuator, i.e., peak force and force at every point in the stroke. Load cell readings will need to go back to either a PC or a data collection system to be analyzed.
There can be difficulties with this approach. There may not be room to fit a load cell on the rod end of an existing installation, or the application could require mechanical modifications to help with mounting the load cell between the actuator rod and the application load.
Install a prototype servo motor electric actuator system. Use the current traces in the servo drive to back-calculate the torque/force profile for the electric actuator. This method can be used because current, torque, and force are all directly proportional. The more current through a motor, the more torque and subsequently the more force out of an actuator.
Calculate force using the equation: Force = Force rating of actuator × (current measured/Kt). Force rating and Kt are provided in the manufacturer's specifications. The result is a close approximation of actuator force based on theoretical calculations. Actual results could vary by as much as 10%.
Every motion profile has parameters besides force that need to be considered when converting to electric actuation. Speed of moves is a critical parameter. Speed or velocity is the rate of change of distance over the rate of change in time (Δ Distance/Δ Time). Record the motion with a video and use the time stamp and distance traveled to approximate the speeds required for each move.
Conclusion
In many applications, converting from hydraulic cylinders to electric linear actuators can improve actuator performance with higher accuracy and repeatability, programmable control of motion parameters, data collection, and reporting capabilities. It can also reduce total cost of ownership through efficient use of electricity, plus little or no required maintenance and related downtime. Force capabilities of electric actuators have been a stumbling block; however, now electric actuators with roller screws can deliver 50,000 lbf (225.5 kN) and higher. The most important thing to remember when planning a conversion is to avoid sizing for fluid power — successful conversion requires an application's actual force requirements.
This article was written by Aaron Dietrich, Director of Marketing, Tolomatic, Inc., Hamel, MN. For more information, Click Here .