
A continuing challenge for modern instrument pointing control systems is to meet the increasingly stringent pointing performance requirements imposed by emerging advanced scientific, defense, and civilian payloads. Instruments such as adaptive optics telescopes, space interferometers, and optical communications make unprecedented demands on precision pointing capabilities. A cost-effective method was developed for increasing the pointing performance for this class of NASA applications.
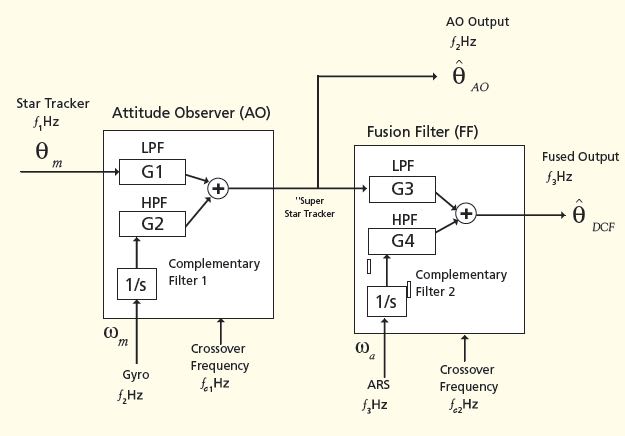
The high-bandwidth attitude estimator fuses an ARS sensor with a standard three-axis suite comprised of a gyro and star tracker. The estimation architecture is based on a dual-complementary filter (DCF) structure. The DCF takes a frequency-weighted combination of the sensors such that each sensor is most heavily weighted in a frequency region where it has the lowest noise.
An important property of the DCF is that it avoids the need to model disturbance torques in the filter mechanization. This is important because the disturbance torques are generally not known in applications. This property represents an advantage over the prior art because it overcomes a weakness of the Kalman filter that arises when fusing more than one rate measurement.
An additional advantage over prior art is that, computationally, the DCF requires significantly fewer real-time calculations than a Kalman filter formulation. There are essentially two reasons for this: the DCF state is not augmented with angular rate, and measurement updates occur at the slower gyro rate instead of the faster ARS sampling rate.
Finally, the DCF has a simple and compelling architecture. The DCF is exactly equivalent to flying two identical attitude observers, one at low rate and one at high rate. These attitude observers are exactly of the form currently flown on typical three-axis spacecraft.
This work was done by David S. Bayard and Joseph J. Green of Caltech for NASA’s Jet Propulsion Laboratory. NPO-48171
This Brief includes a Technical Support Package (TSP).
Three-Axis Attitude Estimation With a High-Bandwidth Angular Rate Sensor
(reference NPO-48171) is currently available for download from the TSP library.
Don't have an account?
Overview
The document titled "Technical Support Package for Three-Axis Attitude Estimation With a High-Bandwidth Angular Rate Sensor" discusses advancements in attitude estimation techniques for spacecraft, particularly focusing on the integration of a high-bandwidth angular rate sensor (ARS) with traditional three-axis attitude estimation systems that utilize star trackers and gyroscopes.
The introduction highlights the increasing demands for precise pointing performance in modern spacecraft, driven by advanced scientific, defense, and civilian payloads. Instruments such as space telescopes and optical communication systems require enhanced pointing capabilities, which can be achieved by augmenting control systems with high-bandwidth sensors and actuators. The document emphasizes the use of fast-steering mirrors (FSM) for fine beam steering corrections, which are more effective than traditional methods of torquing the entire spacecraft.
A key innovation presented in the paper is the Dual Complementary Filter (DCF) approach, which fuses measurements from the ARS, star tracker, and gyro sensors. This method provides high-bandwidth attitude estimates necessary for supporting fast control architectures without the need for torque modeling, making it simpler and more computationally efficient than traditional Kalman filters. The DCF generates both fast-time-scale and slow-time-scale attitude estimates, allowing for effective operation of the spacecraft's attitude control system.
The document also addresses potential criticisms of the DCF, such as its suboptimal nature compared to Kalman filters and the need for accurate modeling and compensation of the ARS. Despite these concerns, the DCF's advantages in computational efficiency and its applicability to real-time systems make it a compelling choice for high-performance pointing applications.
In conclusion, the paper presents a comprehensive overview of the challenges and solutions in modern attitude estimation for spacecraft. By integrating high-bandwidth sensors and employing innovative filtering techniques, the proposed methods aim to meet the stringent pointing requirements of next-generation aerospace missions. The findings underscore the importance of developing robust and efficient attitude estimation systems to support the evolving needs of space exploration and technology.