
Mobile robots that would resemble earthworms have been proposed for use in exploring remote, hostile, or inaccessible terrain surface and subsurface environments. This class of robots would be a special case of a more general class of proposed small, lightweight, relatively inexpensive exploratory robots. Biomorphic explorers would exploit the emerging technology of biomorphic controls and advanced actuators. They would achieve motion by use of simple electronically or photonically controlled, flexible advanced actuators instead of conventional motors with complex drive trains. The robots would carry advanced microsensors for measuring or detecting specific objects or substances. Animallike combinations of mobility, adaptability, fault tolerance and a limited capability for "learning" would be achieved by integrating the actuators with very-large-scale integrated (VLSI) circuits that would implement neural-network and/or genetic algorithms.
The proposed earthwormlike robots would be flexible in the sense that they would be foldable in segments. The first several segments at one or both end(s) of each robot would generate motion. These segments would be covered with hinged plates connected to interior actuators (see figure on page 12b). Upon command, the interior actuator in each segment would shorten or lengthen the segment, causing the plates to buckle outward or to move inward to straighten, respectively. A wave of shortening/buckling versus lengthening/straightening, resembling the peristaltic motion of an earthworm, could be generated by sending coordinated, sequential contraction and expansion commands to the actuators in the segments. By this action, the robot could move along the surface or burrow beneath the surface of terrain. The direction of travel could be reversed by reversing the sequence of buckling and straightening.
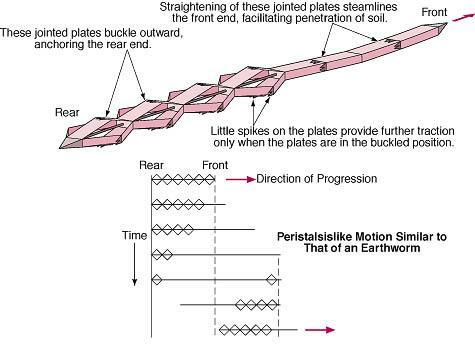
Special-purpose microsensors could be housed in one or more end or middle segment(s). The tips on the end segments could be sharpened to facilitate penetration of soil. Alternatively or in addition, the tips could contain sensors and/or mechanisms to collect samples.
The design of the robot, including the details of the mobility features and the choice of sensors, would be specific to the intended application. For example, an earthwormlike robot might be designed to probe earthquake rubble to find missing persons and animals. The sensors for this application could include a miniature active-pixel-sensor video camera, a temperature sensor, and microspectrometer for detecting carbonates, water, and other chemical signs of life.
This work was done by Sarita Thakoor, Kim Quillin, Alex Fukunaga, John Michael Morookian, and Adrian Stoica of Caltech for NASA's Jet Propulsion Laboratory. NPO-20266
This Brief includes a Technical Support Package (TSP).
Earthwormlike exploratory robots
(reference NPO20266) is currently available for download from the TSP library.
Don't have an account?
Overview
The document discusses the development of earthwormlike exploratory robots designed for navigating challenging terrains, both on the surface and subsurface. These robots utilize a peristalsis-like motion, similar to that of earthworms, achieved through coordinated contraction and expansion of flexible actuators in segmented bodies. This innovative design allows the robots to burrow into soil or move along surfaces, making them suitable for applications in remote, hostile, or inaccessible environments.
The robots feature a segmented, foldable design that enhances their adaptability and fault tolerance. The front and rear segments are primarily responsible for mobility, while the central segments can be equipped with various sensors and payloads tailored to specific missions. For instance, in scenarios such as probing earthquake rubble to locate missing persons, the robots can carry advanced sensors, including miniature active-pixel-sensor cameras, temperature sensors, and microspectrometers for detecting chemical signs of life.
The document highlights the advantages of using biomorphic controls and advanced actuators over traditional motors, which can be complex and costly. The proposed robots are lightweight, low-cost, and capable of operating with minimal power, making them ideal for a range of applications, including exploration, surveillance, and medical diagnostics.
Key features of the earthwormlike robots include their ability to perform bi-directional movement by reversing the sequence of segment shortening and elongation. The design incorporates jointed plates that can buckle outward to provide traction when the robot is in motion. Additionally, the tips of the segments can be modified to sharpen for better soil penetration or to collect samples.
The document emphasizes the potential of these robots to revolutionize exploratory missions by providing enhanced spatial access and reconfigurability, allowing them to adapt to various terrains. The integration of very-large-scale integrated (VLSI) circuits enables the implementation of neural networks and genetic algorithms, giving the robots a limited capacity for learning and adaptability.
Overall, the earthwormlike exploratory robots represent a significant advancement in mobile robotic technology, offering a promising solution for hazardous scouting activities and exploration in challenging environments. The work is a collaborative effort by researchers from NASA's Jet Propulsion Laboratory and UC Berkeley.