
A computer system denoted a change-detection onboard processor (CDOP) is being developed as a means of processing the digitized output of a synthetic-aperture radar (SAR) apparatus aboard an aircraft or spacecraft to generate images showing changes that have occurred in the terrain below between repeat passes of the aircraft or spacecraft over the terrain. When fully developed, the CDOP is intended to be capable of generating SAR images and/or SAR differential interferograms in nearly real time. The CDOP is expected to be especially useful for understanding some large-scale natural phenomena and/or mitigating natural hazards: For example, it could be used for near-real-time observation of surface changes caused by floods, landslides, forest fires, volcanic eruptions, earthquakes, glaciers, and sea ice movements. It could also be used to observe such longer-term surface changes as those associated with growth of vegetation (relevant to estimation of wildfire fuel loads).
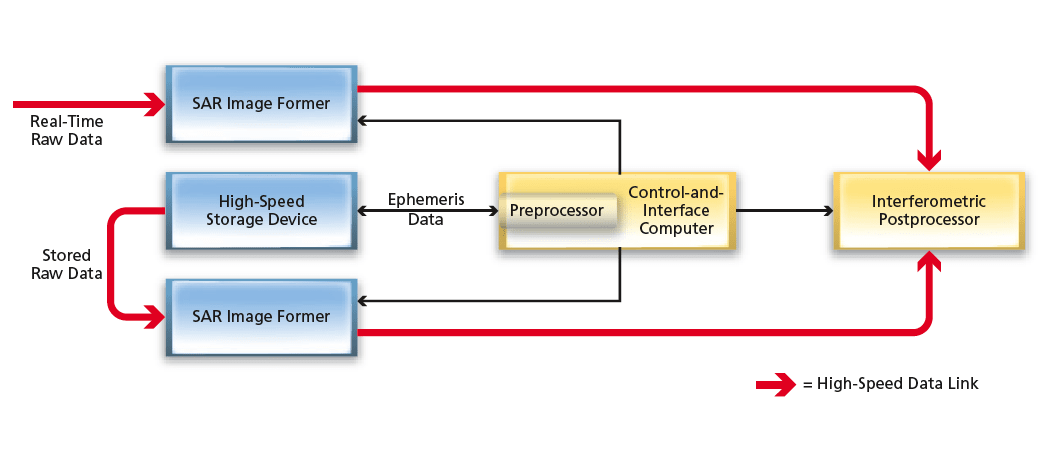
- Preprocessor — A microprocessor within a control-and-interface computer serves as a preprocessor that generates parameters necessary for generation of SAR image data from a combination of ephemeris and radar-configuration data. For the ephemeris data, the preprocessor implements a six-state (three position and three velocity coordinates) Kalman filter to effect real-time reconstruction of the platform trajectory from the outputs of an inertial navigation unit and a Global Positioning System receiver. The preprocessor also includes an azimuth pre-summer to decimate and re-align range-compressed data in the along-track direction, and an optional motion compensation- module for airborne interferometric SAR. The output of the preprocessor is utilized by the SAR image formers described next.
- SAR Image Formers — The raw SAR data are processed into SAR image data by two FPGA SAR processors that implement a range-Doppler algorithm with motion-compensation capability. The two SAR processors accept two input streams of raw radar data: typically, these would be (1) the real-time stream of data from the high-speed digital back end of the operating radar apparatus and (2) a stream of corresponding data from a previous pass retrieved from a high-speed storage device via a fiber-optic link. Alternatively, if the radar platform were to include two radar apparatuses in an interferometric configuration, then the CDOP could process the near-real-time streams of data from these apparatuses for use in generating a single-pass interferogram.
- Interferometric Postprocessor — Another microprocessor generates SAR interferometric image data from the outputs of the two SAR processors. In a typical application, the output of this processor would be transmitted to a ground station (downlinked). Because all of the processing up to the point of downlinking would be done onboard, the downlink data rate necessary for observing changes in the terrain would be significantly reduced.
This work was done by Yunling Lou, Ronald J. Muellerschoen, Steve A. Chien, and Sasan S. Saatchi Caltech and Duane Clark of Leeward Engineering for NASA's Jet Propulsion Laboratory.
NPO-45751
This Brief includes a Technical Support Package (TSP).
Onboard Data Processor for Change- Detection Radar Imaging
(reference NPO-45751) is currently available for download from the TSP library.
Don't have an account?
Overview
The document outlines the development of a Real-Time Autonomous Disturbance Detection and Monitoring System utilizing NASA's UAVSAR (Uninhabited Aerial Vehicle Synthetic Aperture Radar). This system integrates advanced imaging radar technology with high-throughput onboard processing and automated response capabilities, specifically designed for monitoring natural and human-induced disturbances such as wildfires, hurricanes, and other environmental phenomena.
The UAVSAR is a compact, L-band radar system with an 80 MHz bandwidth, capable of fully polarimetric imaging. It is engineered for repeat-pass InSAR (Interferometric Synthetic Aperture Radar) applications, allowing for precise measurements of subtle deformations in the Earth's surface. The system's design emphasizes portability and extensibility, enabling it to be adapted for various platforms beyond its initial testing on the modified NASA Gulfstream III aircraft.
Key features of the UAVSAR include real-time data processing, motion compensation, and antenna beam steering, which enhance its operational capabilities. The onboard SAR processor is calibrated for polarimetric data, ensuring high fidelity in the imagery produced. The system is also equipped with artificial intelligence for decision-making, allowing it to autonomously adjust its mission plans based on real-time data analysis.
The document highlights the system's ability to penetrate cloud cover and operate in darkness, making it a vital tool for disaster management and environmental monitoring. The onboard automated response component, utilizing the CASPER mission planning engine, enables the UAVSAR to retarget its observations based on the analysis of previously acquired data. This closed-loop autonomy allows the system to observe, process, detect events, and replan operations efficiently.
Additionally, the document discusses the challenges of onboard mission planning, particularly the spatial reasoning required to integrate mission objectives with the aircraft's capabilities. The research conducted at the Jet Propulsion Laboratory emphasizes the importance of high-fidelity polarimetric and interferometric processing technologies in reducing data downlink rates and enhancing the effectiveness of Earth observation missions.
Overall, the UAVSAR represents a significant advancement in radar technology, with the potential to support a wide range of scientific applications, including solid earth, cryosphere, and land cover studies, while also addressing critical needs in disaster response and environmental monitoring.