
Traditional robotics has been supported mainly by the automotive industry, so the performance of these devices was adapted to the needs of transportation manufacturers. Envisioning smaller and more lightweight robotics, designers realized that cobots could be used for millions of assembly tasks now being carried out by humans. Following traditional thinking, every cobot in use today is based on electric motors and drives. Something new is on the horizon, however: a cobot based on pneumatic technology that will change the paradigm of a cobot itself and open the door to new ways of thinking about robotic design. Pneumatics will simplify components and make it easy to operate these collaborative units.

Melzer CTO, Festo
Hardly any industrial market segment will grow as rapidly over the next few years as collaborative robotics. Cobots relieve employees of particularly strenuous or monotonous tasks, thus giving them new levels of value-adding activities and making work easier, healthier, and more productive. Sales of cobots for assembly lowered the costs of robots to a level where small- and mid-sized manufacturers can now apply them. In addition to cost reduction, ease-of-use drives the adoption of cobots for small- to mid-sized companies.
The Benefits of Pneumatics
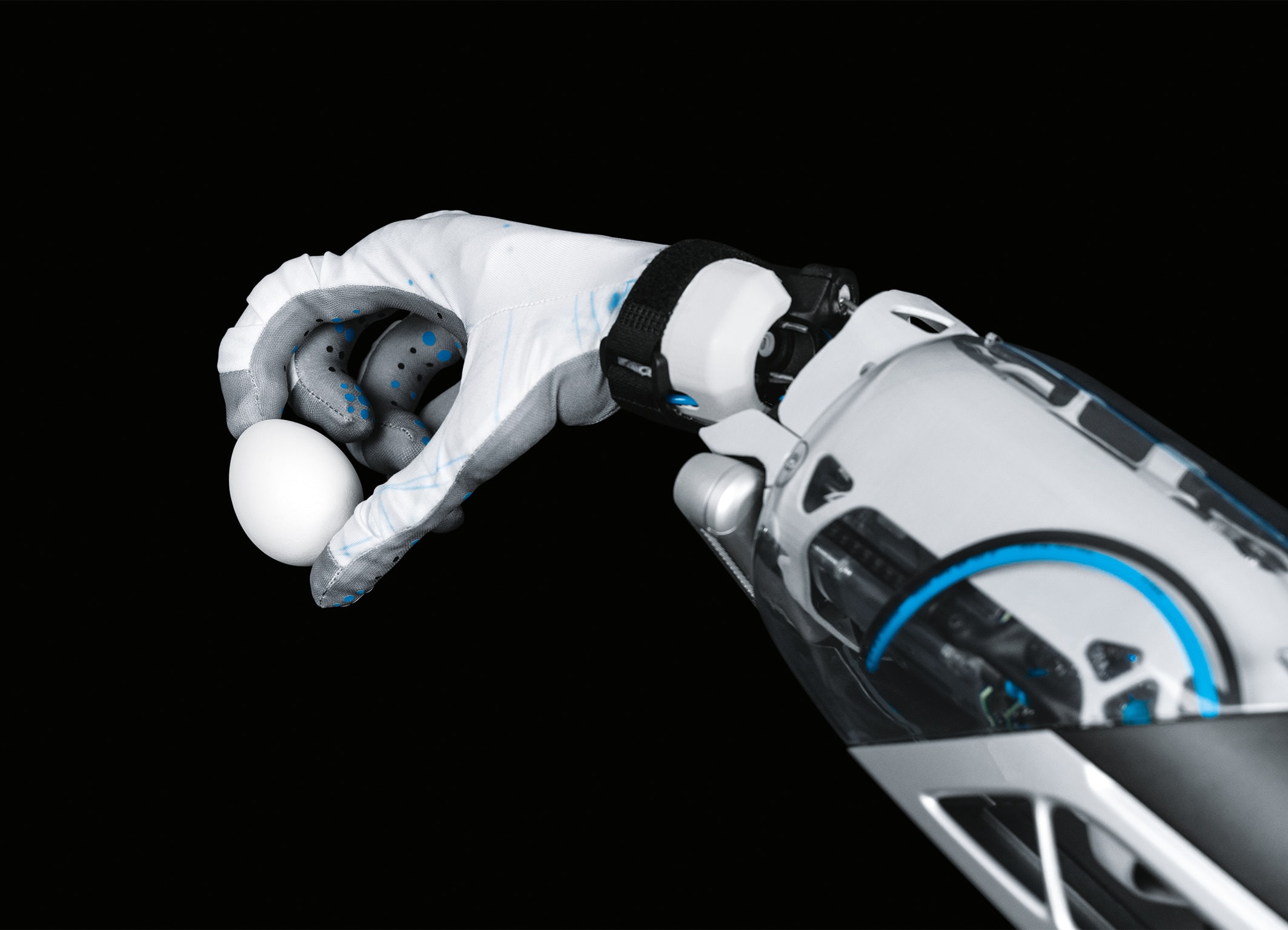
A pneumatic cobot will represent the next development step for the segment of human-robot collaboration. No other technology has such a sensitive and flexible approach human-robot collaboration as pneumatics because changes in air pressure due to contact or adjustment can be immediately sensed and rapidly adjusted.
A cobot based on pneumatics owes many of its advantages, such as sensitivity, weight, and cost value, to the benefits of compressed air technology. The direct drives in the articulated joints are cost-effective and lightweight because, unlike electric solutions, no heavy gear units or expensive force-torque sensors are required.
Because of the uniquely intuitive and simple commissioning and programming of pneumatics, it is quick and easy to comprehend, and extensive training is not required. A pneumatic cobot will be less expensive than electric cobots in the same class and will provide excellent value for the money in its main application area of small parts handling. Lower cost and ease of use continue to lower barriers to employ robotics for small- and medium-sized companies.
Easy to Operate and Flexible to Use
A pneumatic cobot will consist of the articulated arm, a handheld module, and software. To be successful the software must be intuitive. Pneumatic drives enable the robot arm to be easily guided by hand and without any resistance so that waypoints or paths can be taught quickly and precisely. The future of cobots demands, especially for smaller companies, that commissioning and programming should be accomplished in less than an hour. Why so short a time? Because these units must be easy to use by the typical worker. This quality lessens resistance to technology. Prior knowledge of robotics must not be necessary.
Especially for small- and medium-sized companies, cobots are only attractive if they can practically and quickly assume a new task, not just permanently perform the same job. The pneumatic cobot will meet this requirement as it doesn't require an additional control cabinet that is difficult to connect and cumbersome to move. A compact controller will be integrated in the cobot’s base, increasing its flexibility. Simple connections also allow it to be used ad hoc and without long changeover times. Common bus standards will enable fast connection to higher-order controllers.
Thanks to state-of-the-art, lightweight construction methods, the weight of these units should be under 20 kg, which will facilitate quick and easy movement to other locations.
Working Safer and Faster
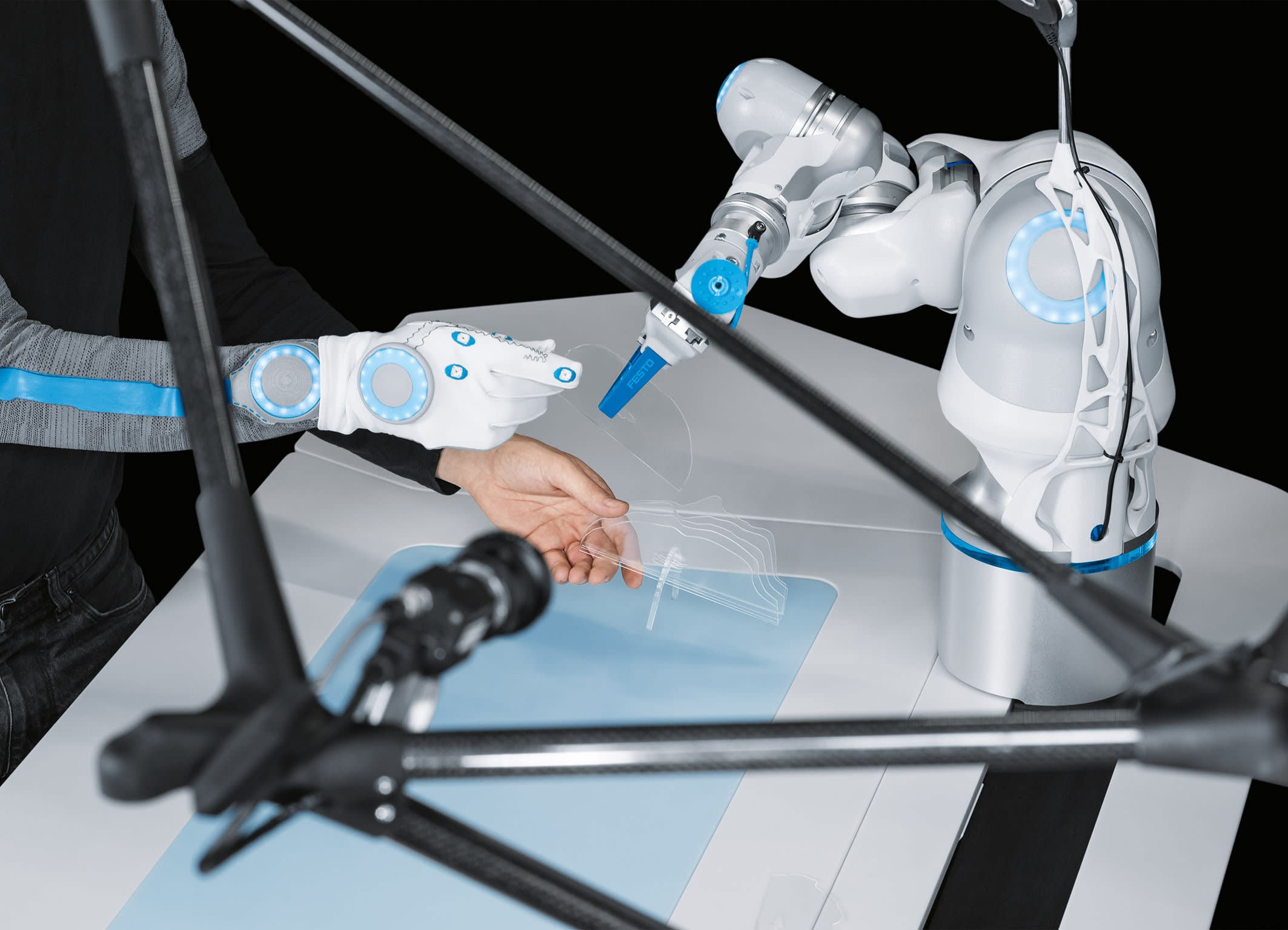
A pneumatic cobot should be able to function similarly to a human arm and be perceived as a helping third hand when working with a team member. It will move like a real colleague — within a manageable radius. Thanks to the flexibility of pneumatic drives, the cobot acts sensitively — at a speed appropriate to the situation and with fluid, harmonious movements.
Designers will ensure it is as soft to the touch as human contact. The surfaces of the pneumatic cobot will be smooth and rounded at the edges so that humans collaborating with the pneumatic cobot cannot be hurt.
Pneumatic direct drives and light weight reduce contact energy. Pressure regulators in the articulated joints will allow the robot to recognize when it is being touched and respond with appropriate safety functionality.
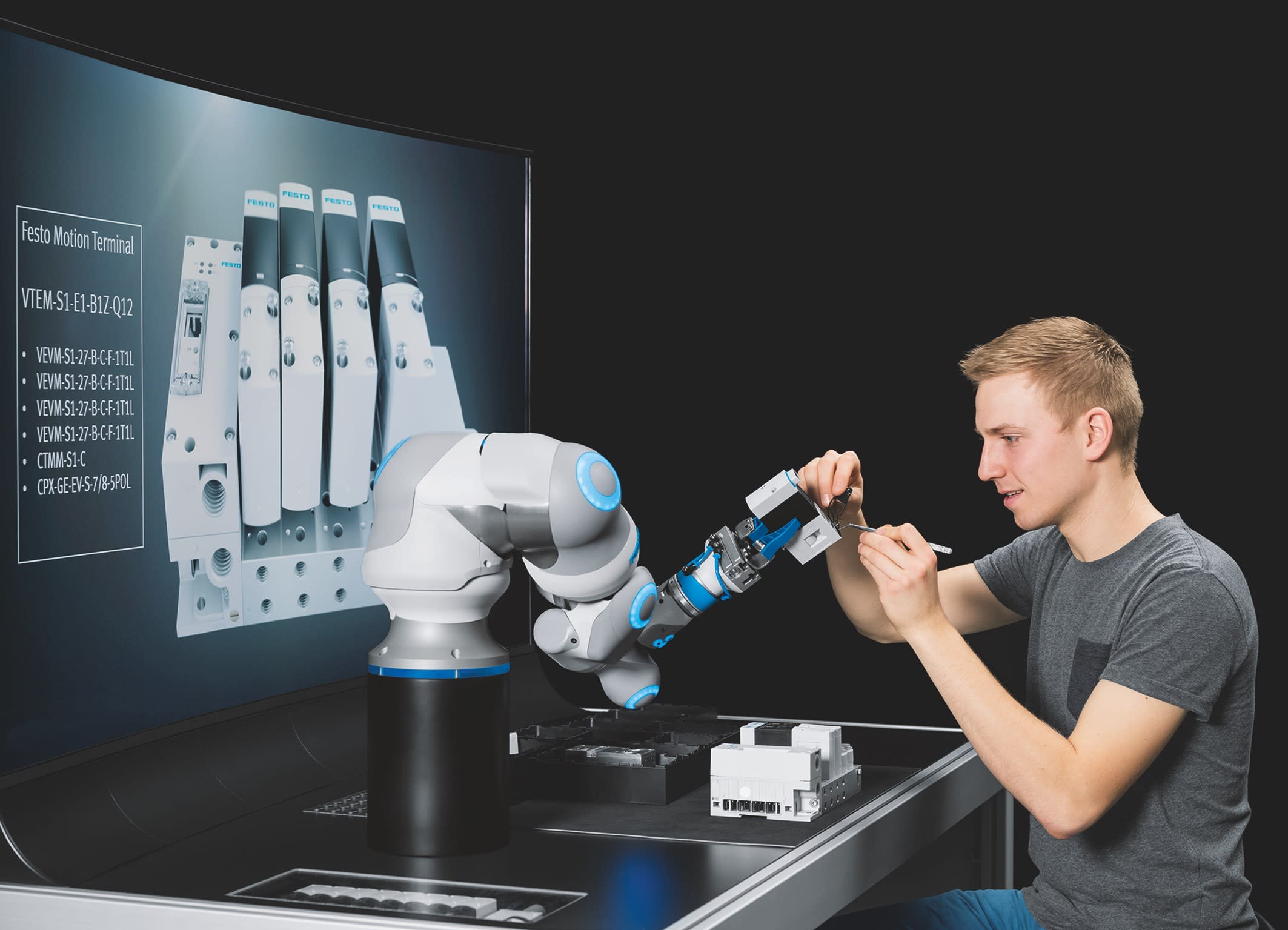
Collaborative robots originally were developed to help workers perform assembly tasks; today, they have many more applications. One potential application for a pneumatic cobot will be in 3D printers, where units remove powder residue by blowing it off and then detach the finished component. In logistics operations, the cobot can apply labels to packages of different heights using its fine sensor technology without pressing in or damaging the surface.
ISO/TS 15066 and the need to specify each individual application according to safety aspects are the limiting factors so far in terms of barriers to a broader adoption of cobots. The inherent safety features of pneumatic cobots should help lower those barriers and speed adoption.
Robots have always been electrically driven. Shortly there will be pneumatically powered units. What other new, different, and exciting features will design engineers invent to advance human/ machine collaboration? Adaptive gripping is one area of great interest. Time will tell.
This article is written by Dr. Frank Melzer, Chief Technology Officer, Member of the Management Board, Product and Technology Management, Festo. For more information, visit here .
Transcript
00:00:04 [موسيقى] ان [موسيقى] c [موسيقى] [موسيقى] [موسيقى] c [موسيقى] [موسيقى]
00:02:23 [موسيقى] r [موسيقى] [موسيقى] r hallo